2 trial operation via mechatrolink-ii – Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors - MECHATROLINK-II Communications Reference User Manual
Page 109
4 Operation
4.4.2 Trial Operation via MECHATROLINK-II
4-24
4.4.2 Trial Operation via MECHATROLINK-II
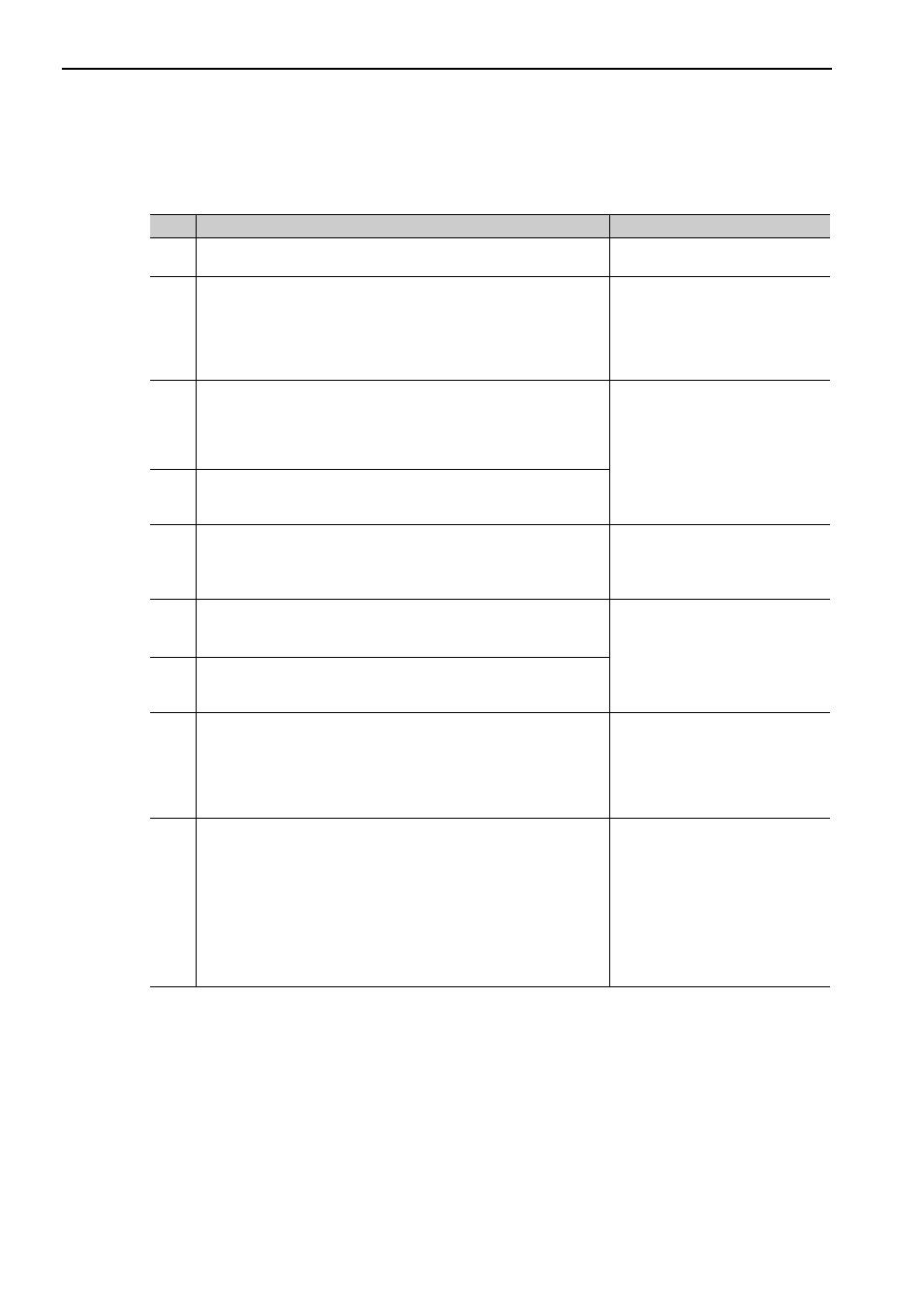
The following table provides the procedures for trial operation via MECHATROLINK-II.
Step
Description
Reference
1
Confirm that the wiring is correct, and then connect the I/O signal con-
nector (CN1 connector).
3 Wiring and Connection
2
Turn ON the power to the SERVOPACK.
If the SERVOPACK is receiving power, the CHARGE, the POWER,
and the COM LED indicators on the SERVOPACK will light up.
Note: If the COM LED does not turn ON, recheck the settings of
MECHATROLINK-II setting switches (SW1, SW2) and then
turn the power OFF and ON again.
–
3
Send the CONNECT command.
In the response data from the SERVOPACK, the alarm code "00" is
cleared to show normal operation.
The response data from the SERVOPACK may be confirmed with the
SMON command.
Σ
-V Series User’s Manual
MECHATROLINK-II Commands
(No.: SIEP S800000 54)
4
Check the product type using an ID_RD command.
A reply showing the product type, such as SGDV-R90A11A, is received
from the SERVOPACK.
5
Set the following items to the necessary settings for a trial operation.
• Electronic gear settings
• Rotational direction of servomotor
• Overtravel
4.4.3 Electronic Gear
4.3.1 Servomotor Rotation Direction
4.3.2 Overtravel
6
Save these settings (step 5).
If saving the settings in the controller, use the PRM_WR command.
If saving settings in the SERVOPACK, use the PPRM_WR command.
Σ
-V Series User’s Manual
MECHATROLINK-II Commands
(No.: SIEP S800000 54)
7
Send the SV_ON command.
A reply showing that the servomotor has switched to Drive status and
that SVON=1 (servomotor power is ON) is received.
8
Run the servomotor at low speed.
<Example using a positioning command>
Command used: POSING
Command setting: Option = 0, Positioning position =10000 (If using
the absolute encoder, add 10000 to the present position), rapid traverse
speed= 400
–
9
Check the following points while running the servomotor at low speed
(step 8).
• Confirm that the rotational direction of the servomotor correctly coin-
cides with the forward rotation or reverse rotation reference. If they do
not coincide, reset the direction.
• Confirm that no unusual vibrations, noises, or temperature rises occur.
If any abnormalities are seen, correct the conditions.
Note: Because the running-in of the load machine is not sufficient at the
time of the trial operation, the servomotor may become over-
loaded.
4.3.1 Servomotor Rotation Direction
9.4 Troubleshooting Malfunction
Based on Operation and Conditions
of the Servomotor