Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors - MECHATROLINK-II Communications Reference User Manual
Page 316
9.1 Alarm Displays
9-19
9
Trou
blesh
ooting
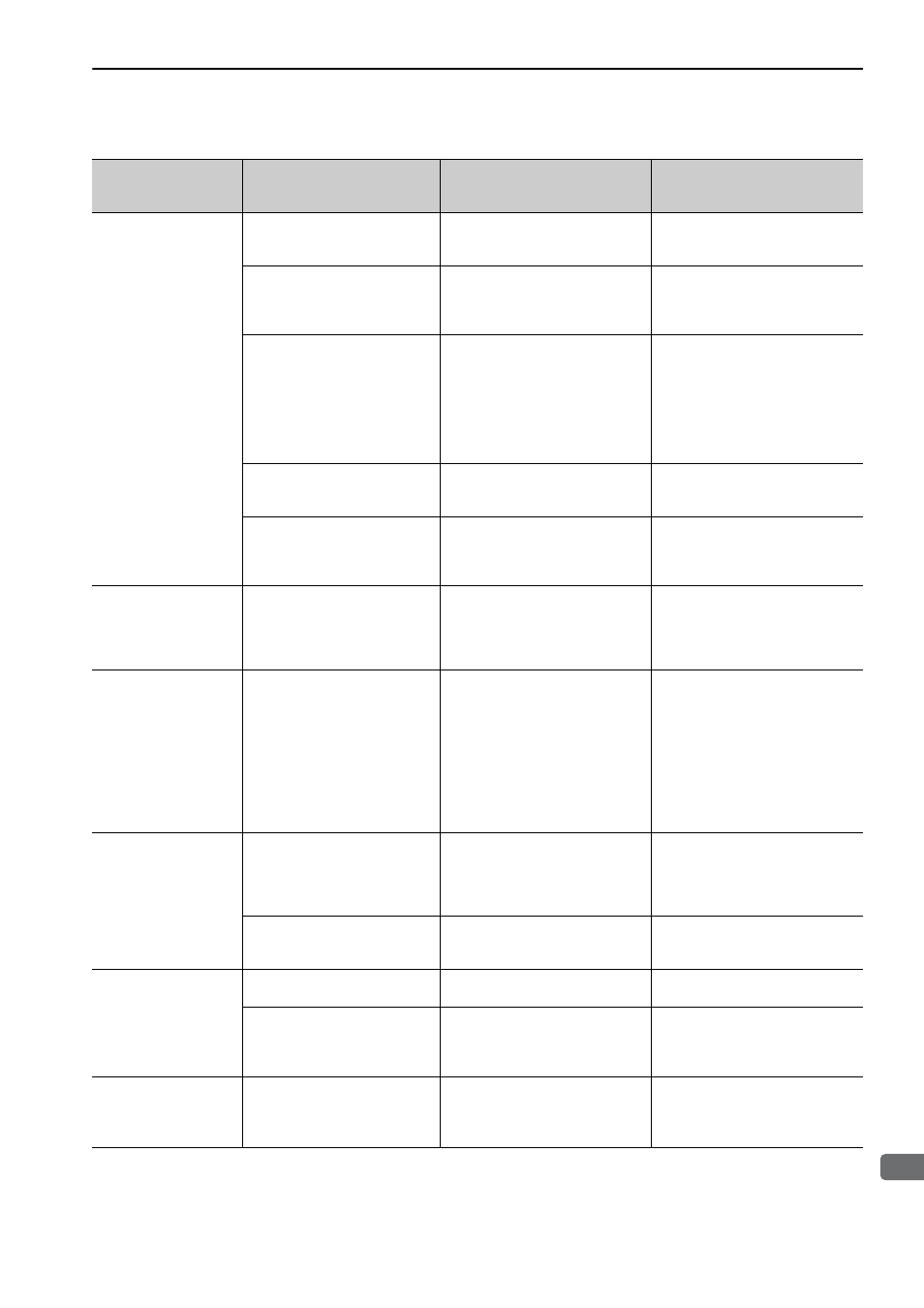
A.d00:
Position Error Over-
flow
(Position error exceeded
the value set in the
excessive position error
alarm level (Pn520).)
The servomotor U, V, and W wir-
ings is faulty.
Check the servomotor main circuit
cable connection.
Confirm that there is no contact
fault in the motor wiring or encoder
wiring.
The position reference speed is
too high.
Reduce the reference speed, and
operate the SERVOPACK.
Reduce the position reference speed
or acceleration of position refer-
ence. Or, reconsider the electronic
gear ratio.
The acceleration of the position
reference is too high.
Reduce the reference acceleration,
and operate the SERVOPACK.
Reduce the reference acceleration
of the position reference using a
MECHATROLINK command, or
smooth the acceleration of the posi-
tion reference by selecting the posi-
tion reference filter (ACCFIL)
using a MECHATROLINK com-
mand.
Setting of the excessive position
error alarm level (Pn520) is low
against the operating condition.
Check the alarm level (Pn520) to
see if it is set to an appropriate
value.
Set the Pn520 to proper value.
A SERVOPACK fault occurred.
−
Turn the power supply OFF and
then ON again. If the alarm still
occurs, the SERVOPACK may be
faulty. Replace the SERVOPACK.
A.d01:
Position Error Over-
flow Alarm at Servo
ON
This alarm occurs if the servomo-
tor power is turned ON when the
position error is greater than the
set value of Pn526 while the ser-
vomotor power is OFF.
Check the position error amount
(Un008) while the servomotor
power is OFF.
Correct the excessive position error
alarm level at servo ON (Pn526).
A.d02:
Position Error Over-
flow Alarm by Speed
Limit at Servo ON
When the position errors remain
in the error counter, Pn529 limits
the speed if the servomotor power
is ON. If Pn529 limits the speed
in such a state, this alarm occurs
when position references are
input and the number of position
errors exceeds the value set for
the excessive position error alarm
level (Pn520).
−
Correct the excessive position error
alarm level (Pn520).
Or, adjust the speed limit level at
servo ON (Pn529).
A.d10:
Motor-load Position
Error Overflow
Motor rotation direction and
external encoder installation
direction are opposite.
Check the and the external encoder
installation direction.
Install the external encoder in the
opposite direction, or change the
setting of the external encoder
usage method (Pn002.3) to reverse
the direction.
Mounting of the load (e.g., stage)
and external encoder joint instal-
lation are incorrect.
Check the external encoder
mechanical connection.
Check the mechanical joints.
A.E02:
MECHATROLINK
Internal Synchroniza-
tion Error 1
MECHATROLINK transmission
cycle fluctuated.
−
Remove the cause of transmission
cycle fluctuation at host controller.
A SERVOPACK fault occurred.
−
Turn the power supply OFF and
then ON again. If the alarm still
occurs, the SERVOPACK may be
faulty. Replace the SERVOPACK.
A.E40:
MECHATROLINK
Transmission Cycle
Setting Error
Setting of MECHATROLINK
transmission cycle is out of speci-
fications range.
Check the MECHATROLINK
transmission cycle setting.
Set the transmission cycle to the
proper value.
(cont’d)
Alarm Number:
Alarm Name
(Alarm Description)
Cause
Investigative Actions
Corrective Actions