46 and 64 – Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors - MECHATROLINK-II Communications Reference User Manual
Page 219
5 Adjustments
5.8.6 Backlash Compensation Function
5-66
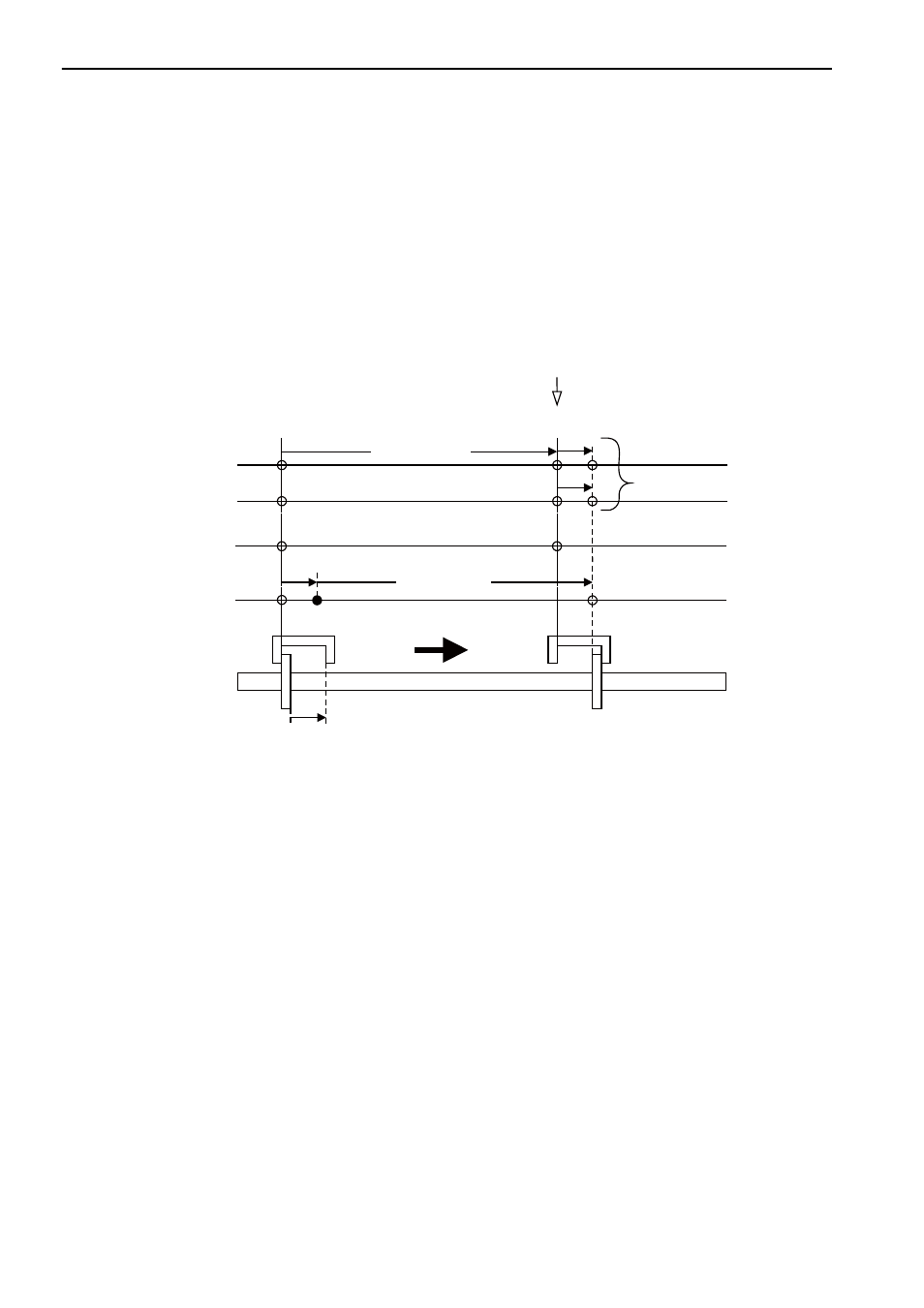
When Servo is OFF
Backlash compensation is not applied when the servo is OFF (i.e., when the servomotor is not powered).
Therefore, the reference position POS moves by only the backlash compensation value.
The relationship between APOS and the servomotor shaft position is as follows:
• When servo is OFF: APOS = Servomotor shaft position
The following figure shows what happens when the servo is turned OFF after driving the servomotor in the
forward direction from target position TPOS0 to TPOS1. Backlash compensation is not applied when the
servo is OFF (i.e., the SERVOPACK manages the position data so that APOS and POS are the same).
When There is Overtravel
When there is overtravel (i.e., when driving is prohibited due to an overtravel signal or software limit), the
operation is the same as for When Servo is OFF, i.e., backlash compensation is not applied.
When Control is Changed
Backlash compensation is performed only for position control.
Backlash compensation is not applied if changing from position control to any other type of control.
Backlash compensation is applied in the same way as When Servo is ON if changing from any other type of
control to position control.
When Safety Module Active Mode is Used
During an operation in active mode function, the operation is the same as for When Servo is OFF, i.e., back-
lash compensation is not applied.
Machine axis
Motor axis
Machine axis
Pn231
Travel distance
Target position
TPOS0
Travel distance
Target position
TPOS1
Motor axis
POS
APOS
Backlash
䋨= Pn231䋩
Servo OFF
Status with no backlash
compensation POS = APOS
46 and 64