2 troubleshooting of warnings – Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors - MECHATROLINK-II Communications Reference User Manual
Page 321
9 Troubleshooting
9.2.2 Troubleshooting of Warnings
9-24
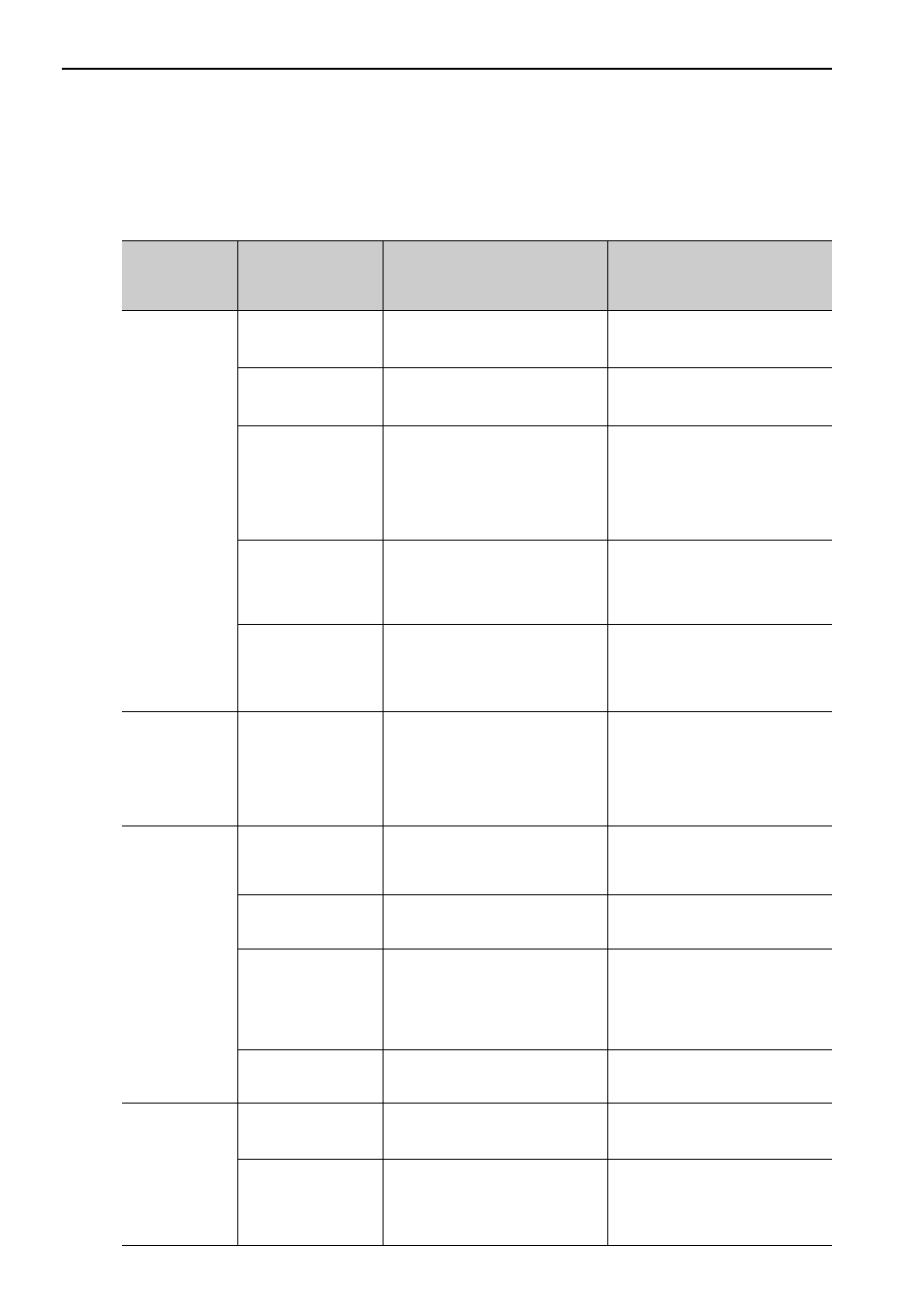
9.2.2 Troubleshooting of Warnings
Refer to the following table to identity the cause of a warning and the action to be taken. Contact your
Yaskawa representative if the problem cannot be solved by the described corrective action.
Warning Num-
ber: Warning
Name (Warning
Description)
Cause
Investigative Actions
Corrective Actions
A.900:
Position Error
Overflow
The servomotor U, V,
and W wirings is faulty.
Check the servomotor main circuit
cable connection.
Confirm that there is no contact fault
in the motor wiring or encoder wiring.
The SERVOPACK gain
is too low.
Check the SERVOPACK gain.
Increase the servo gain by using the
function such as advanced autotuning.
The acceleration of the
position reference is too
high.
Reduce the reference acceleration, and
operate the SERVOPACK.
Reduce the reference acceleration of
the position reference using a
MECHATROLINK command, or
smooth the acceleration of the position
reference by selecting the position ref-
erence filter (ACCFIL) using a
MECHATROLINK command.
Setting of the excessive
position error alarm
level (Pn520) is low
against the operating
condition.
Check the alarm level (Pn520) to see
if it is set to an appropriate value.
Set the Pn520 to proper value.
A SERVOPACK fault
occurred.
−
Turn the power supply OFF and then
ON again. If the alarm still occurs, the
SERVOPACK may be faulty. Replace
the SERVOPACK.
A.901:
Position Error
Overflow Alarm
at Servo ON
When the servomotor
power is ON, the posi-
tion error exceeded the
parameter setting
(Pn526
×Pn528/100).
−
Set an appropriate value for the exces-
sive position error warning level at
servo ON (Pn528).
A.910:
Overload
(Warning before
alarm A.710 or
A.720 occurs)
Incorrect wiring or con-
tact fault of servomotor
and encoder.
Check the wiring.
Confirm that the servomotor and
encoder are correctly wired.
Operation beyond the
overload protection
characteristics.
Check the motor overload characteris-
tics and executed run command.
Reconsider the load conditions and
operating conditions. Or, increase the
motor capacity.
Excessive load was
applied during opera-
tion because the servo-
motor was not driven
due to mechanical prob-
lems.
Check the executed operation refer-
ence and motor speed.
Remove the mechanical problems.
A SERVOPACK fault
occurred.
−
The SERVOPACK may be faulty.
Replace the SERVOPACK.
A.911:
Vibration
Abnormal vibration was
detected at the motor
speed.
Check for abnormal noise from the
servomotor, and check the speed and
torque waveforms during operation.
Reduce the motor speed or reduce the
servo gain by using the function such
as one-parameter tuning.
The moment of inertia
ratio (Pn103) value is
greater than the actual
value or is greatly
changed.
Check the moment of inertia ratio.
Set the moment of inertia ratio
(Pn103) to an appropriate value.