3 monitoring operation during adjustment, 1) connector cn5 for analog monitor, 2) monitor signal – Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors - MECHATROLINK-II Communications Reference User Manual
Page 158: M-ii, 46 and 64, Connection example
5.1 Type of Adjustments and Basic Adjustment Procedure
5-5
5
Adjustm
e
nts
5.1.3 Monitoring Operation during Adjustment
Check the operating status of the machine and signal waveform when adjusting the servo gain. Connect a mea-
suring instrument, such as a memory recorder, to connector CN5 analog monitor connector on the SERVO-
PACK to monitor analog signal waveform.
The settings and parameters for monitoring analog signals are described in the following sections.
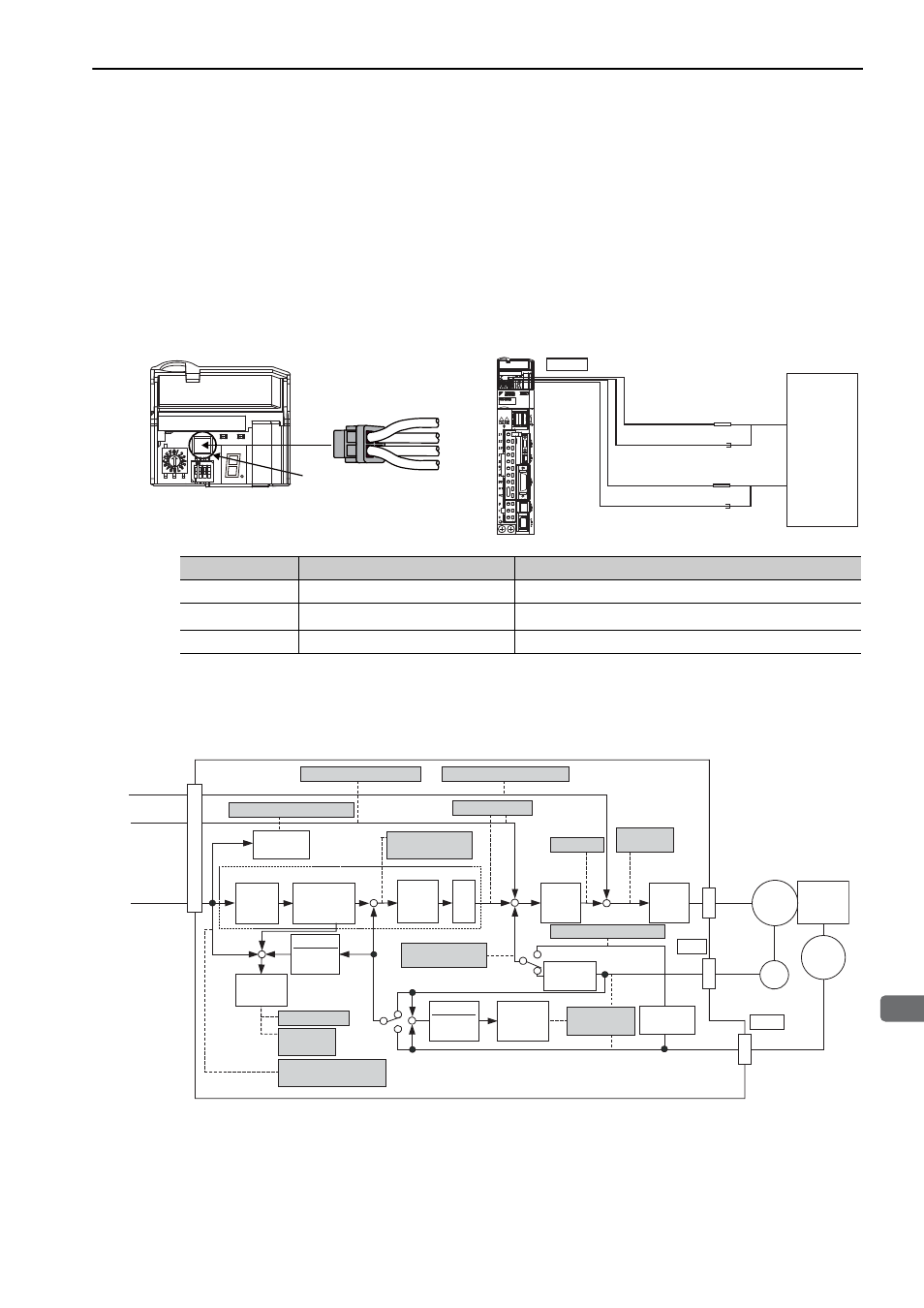
(1) Connector CN5 for Analog Monitor
To monitor analog signals, connect a measuring instrument with cable (JZSP-CA01-E) to the connector CN5.
(2) Monitor Signal
The shaded parts in the following diagram indicate analog output signals that can be monitored.
∗ Available when the fully-closed loop control is being used.
Line Color
Signal Name
Factory Setting
White
Analog monitor 1
Torque reference: 1 V/100% rated torque
Red
Analog monitor 2
Motor speed: 1 V/1000 min
-1
Black (2 lines)
GND
Analog monitor GND: 0 V
Probe
GND
Probe
GND
Measuring
Probe
Measuring
Probe
Measuring
Instrument*
White
Red
Black
Black
CN5
CN5
JZSP-CA01-E
White
Red
Black
Black
Connection Example
* Measuring instrument is not included.
M-II
(U/V/W)
−
+
∗
∗
∗
∗
+
+
+
Torque
reference
Speed
reference
Position
reference
+
−
−
+
+
1
SERVOPACK
Speed feedforward
Position reference speed
Position
amplifier error
Motor rotational
speed
Speed reference
Active gain
Torque
reference
Speed
conversion
Speed
loop
Current
loop
Fully-closed
loop control
Electronic
gear
1
Electronic
gear
Torque feedforward
Error
counter
Error
counter
Error
counter
Load
M
Kp
Position error
Positioning
completed
Completion of position
reference
External encoder speed
Speed
conversion
Speed
conversion
Motor - load
position error
CN31
ENC
CN2
External
ENC
-
+
Electronic
gear
Backlash
compensation
Position loop
46 and 64