Caution, 62 (7) operation with utility functions, 8) servo ready output (/s-rdy) – Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors - MECHATROLINK-II Communications Reference User Manual
Page 147: 9) brake signal (/bk), Mecha
4 Operation
4.9.1 Hard Wire Base Block (HWBB) Function
4-62
(7) Operation with Utility Functions
The HWBB function works while the SERVOPACK operates in the utility function.
If any of the following utility functions is being used with the /HWBB1 and /HWBB2 signals turned OFF, the
SERVOPACK cannot be operated by turning ON the /HWBB1 and /HWBB2 signals. Cancel the utility func-
tion first, and then set the SERVOPACK to the utility function again and restart operation.
• JOG operation (Fn002)
• Origin search (Fn003)
• Program JOG operation (Fn004)
• Advanced autotuning (Fn201)
• EasyFFT (Fn206)
• Automatic offset-signal adjustment of motor current detection signal (Fn00E)
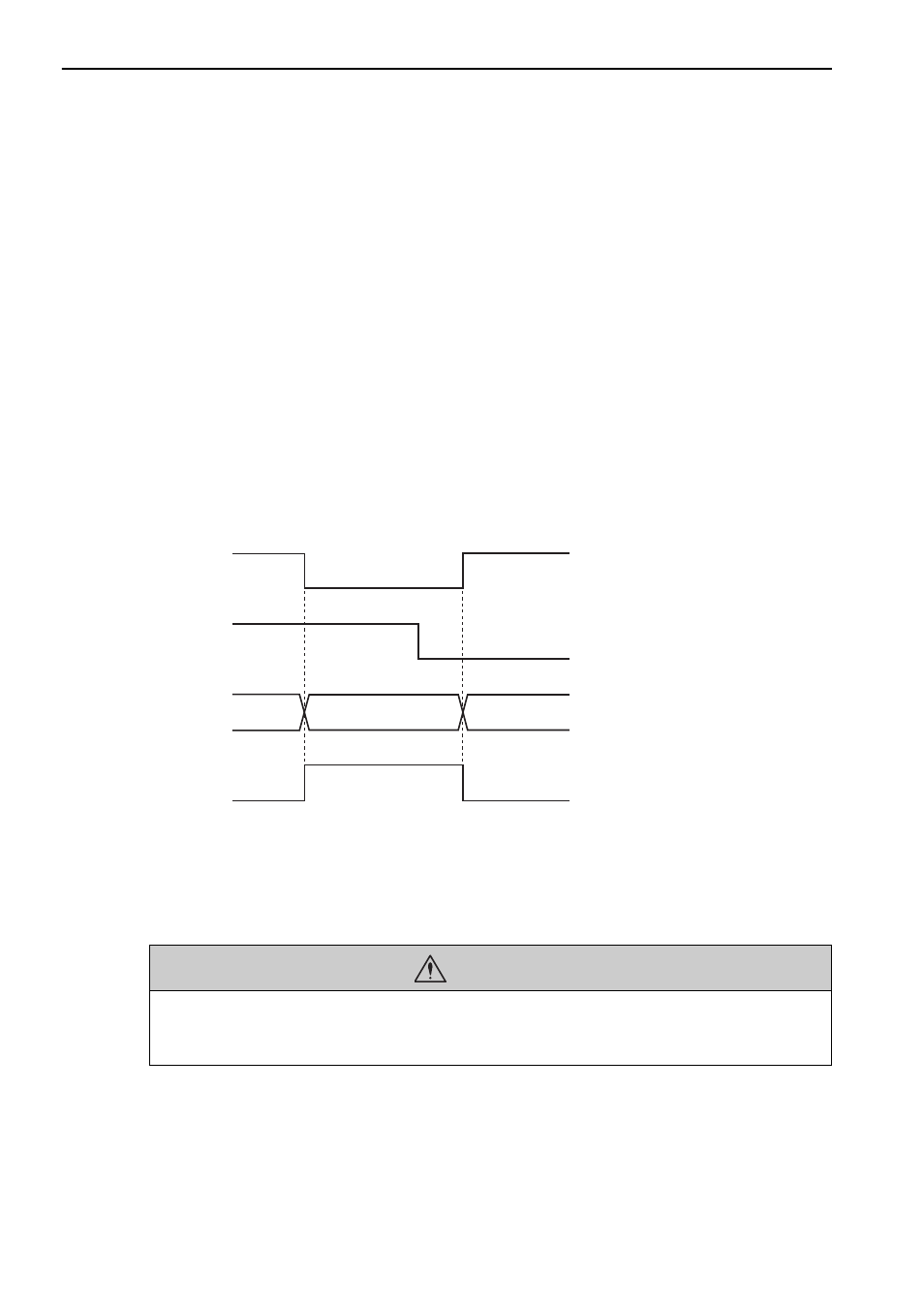
(8) Servo Ready Output (/S-RDY)
The servo ON (SV_ON) command will not be accepted in the HWBB state. Therefore, the servo ready output
will turn OFF. The servo ready output will turn ON if the servomotor power is OFF (set to BB state) when
both the /HWBB1 and /HWBB2 signals are ON.
The following diagram shows an example where the main circuit power supply is turned ON, the Turn
Encoder Power Supply ON (SENS_ON) command is sent (with an absolute encoder), and no servo alarm
occurs.
(9) Brake Signal (/BK)
When the /HWBB1 or /HWBB2 signal is OFF and the HWBB function operates, the brake signal (/BK) will
turn OFF. At that time, Pn506 (brake reference - servo OFF delay time) will be disabled. Therefore, the servo-
motor may be moved by external force until the actual brake becomes effective after the brake signal (/BK)
turns OFF.
/HWBB1
/HWBB2
Servomotor
Power
/S-RDY
ON
(Normal
operation)
ON
(Normal operation)
OFF
ON
OFF
(Motor current
shut-off request)
ON
OFF
ON
HWBB state
BB state
Operating
SERVOPACK
State
MECHA
CAUTION
• The brake signal is not a safety-related part of a control system. Be sure to design the system so that the
system will not be put into danger if the brake signal fails in the HWBB state. Moreover, if a servomotor
with a brake is used, keep in mind that the brake for the servomotor is used only to prevent the movable
part from being moved by gravity or an external force and it cannot be used to brake the servomotor.