Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors - MECHATROLINK-II Communications Reference User Manual
Page 312
9.1 Alarm Displays
9-15
9
Trou
blesh
ooting
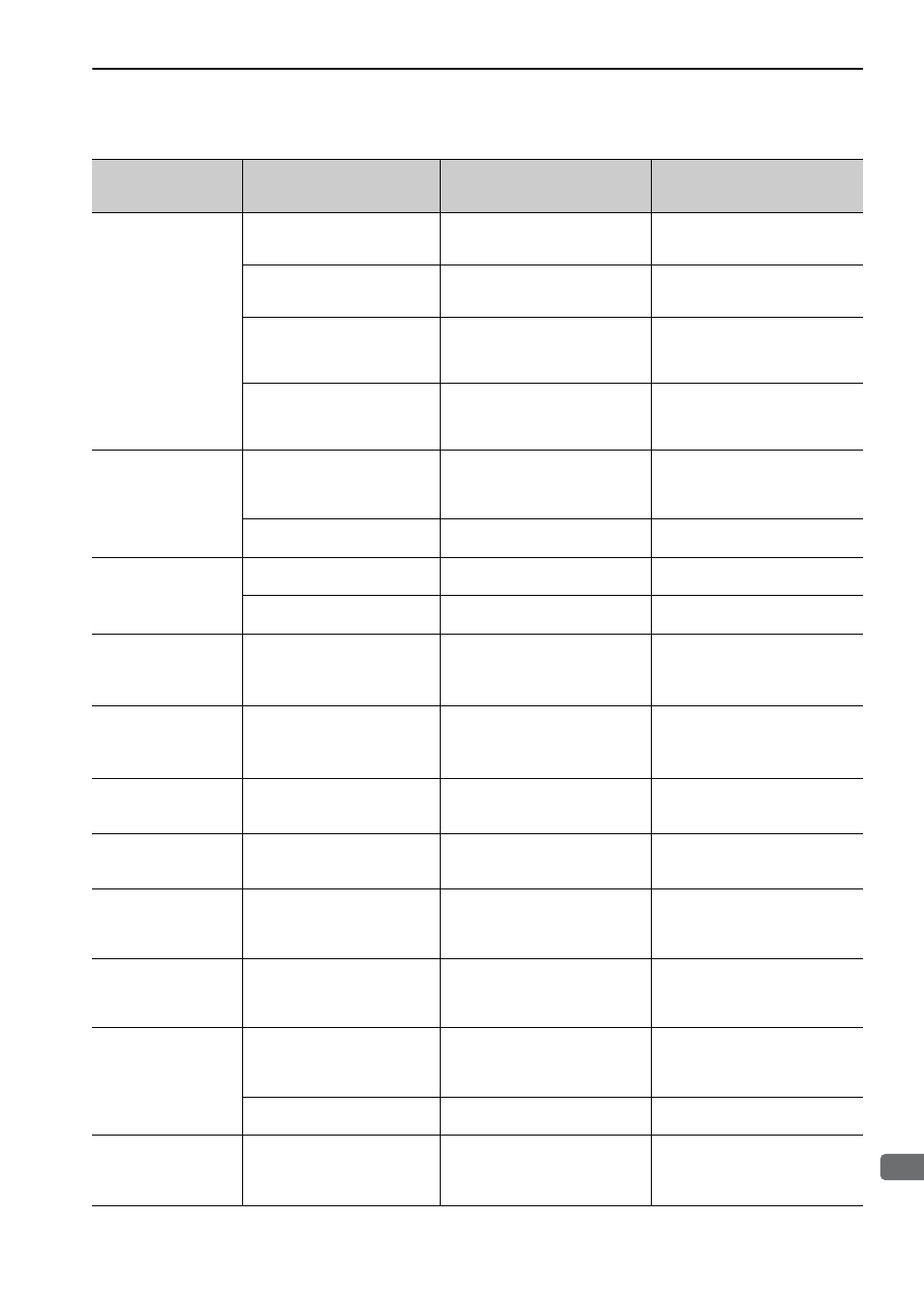
A.860:
Encoder Overheated
(Only when an absolute
encoder is connected.)
(Detected on the encoder
side.)
The ambient operating tempera-
ture around the servomotor is too
high.
Measure the ambient operating tem-
perature around the servomotor.
Reduce the ambient operating tem-
perature of the servomotor to 40
°C
or less.
The motor load is greater than the
rated load.
Check the accumulated load ratio
(Un009) to see the load.
Operate the SERVOPACK so that
the motor load remains within the
specified range.
An encoder fault occurred.
−
Turn the power supply OFF and
then ON again. If the alarm still
occurs, the servomotor may be
faulty. Replace the servomotor.
A SERVOPACK fault occurred.
−
Turn the power supply OFF and
then ON again. If the alarm still
occurs, the SERVOPACK may be
faulty. Replace the SERVOPACK.
A.8A0:
External Encoder Er-
ror
Setting the zero point position of
external absolute encoder failed
because the servomotor rotated.
Before setting the zero point posi-
tion, use the fully-closed feedback
pulse counter (Un00E) to confirm
that the servomotor is not rotating.
The servomotor must be stopped
while setting the zero point posi-
tion.
An external encoder fault
occurred.
−
Replace the external encoder.
A.8A1:
External Encoder Er-
ror of Module
An external encoder fault
occurred.
−
Replace the external encoder.
A serial converter unit fault
occurred.
−
Replace the serial converter unit.
A.8A2:
External Encoder Er-
ror of Sensor
(Incremental)
An external encoder fault
occurred.
−
Replace the external encoder.
A.8A3:
External Encoder Er-
ror of Position
(Absolute)
An external absolute encoder
fault occurred.
−
The external absolute encoder may
be faulty. Refer to the encoder man-
ufacturer’s instruction manual for
corrective actions.
A.8A5:
External Encoder
Overspeed
The overspeed from the external
encoder occurred.
Check the maximum speed of the
external encoder.
Keep the external encoder below its
maximum speed.
A.8A6:
External Encoder
Overheated
The overheat from the external
encoder occurred.
−
Replace the external encoder.
A.b31:
Current Detection Er-
ror 1
The current detection circuit for
phase U is faulty.
−
Turn the power supply OFF and
then ON again. If the alarm still
occurs, the SERVOPACK may be
faulty. Replace the SERVOPACK.
A.b32:
Current Detection Er-
ror 2
The current detection circuit for
phase V is faulty.
−
Turn the power supply OFF and
then ON again. If the alarm still
occurs, the SERVOPACK may be
faulty. Replace the SERVOPACK.
A.b33:
Current Detection Er-
ror 3
The detection circuit for the cur-
rent is faulty.
−
Turn the power supply OFF and
then ON again. If the alarm still
occurs, the SERVOPACK may be
faulty. Replace the SERVOPACK.
The servomotor main circuit
cable is disconnected.
Check for disconnection of the ser-
vomotor main circuit cable.
Correct the servomotor wiring.
A.b6A:
MECHATROLINK
Communications ASIC
Error 1
SERVOPACK MECHA-
TROLINK communication sec-
tion fault.
−
Turn the power supply OFF and
then ON again. If the alarm still
occurs, the SERVOPACK may be
faulty. Replace the SERVOPACK.
(cont’d)
Alarm Number:
Alarm Name
(Alarm Description)
Cause
Investigative Actions
Corrective Actions