2 i/o signal connections, 1 i/o signal (cn1) names and functions, 1) input signals – Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors - MECHATROLINK-II Communications Reference User Manual
Page 67
3 Wiring and Connection
3.2.1 I/O Signal (CN1) Names and Functions
3-18
3.2 I/O Signal Connections
This section describes the names and functions of I/O signals (CN1). Also connection examples by control
method are shown.
3.2.1 I/O Signal (CN1) Names and Functions
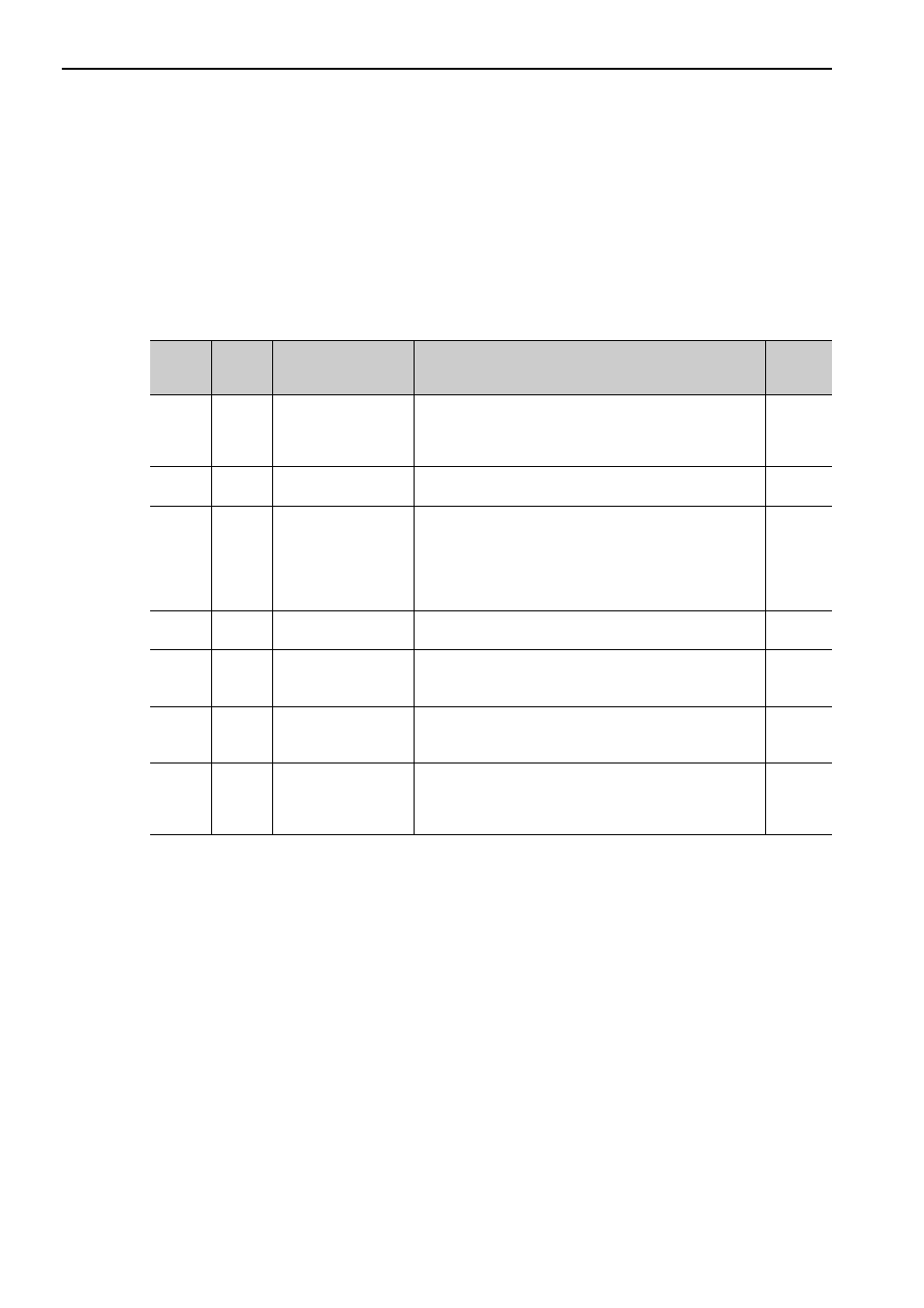
The following table shows the names and functions of I/O signals (CN1).
(1) Input Signals
Note 1. The allocation of the input signals (/SI1 to /SI6) can be changed. For details, refer to 3.3.1 Input Signal Alloca-
tions.
2. If the Forward run prohibited/ Reverse run prohibited function is used, the SERVOPACK is stopped by software
controls, not by electrical or mechanical means. If the application does not satisfy the safety requirements, add an
external circuit for safety reasons as required.
Signal Pin No.
Name
Function
Refer-
ence
Section
P-OT
(/SI1)
N-OT
(/SI2)
7
8
Forward run
prohibited,
Reverse run
prohibited
With overtravel prevention: Stops servomotor when movable
part travels beyond the allowable range of motion.
4.3.1
/DEC
(/SI3)
9
Homing deceleration
switch signal
Connects the deceleration limit switch for homing.
−
/EXT 1
(/SI4)
/EXT 2
(/SI5)
/EXT 3
(/SI6)
10
11
12
External latch signal 1
External latch signal 2
External latch signal 3
Connects the external signals that latch the current feedback
pulse counter.
−
/SI0
13
General-purpose input
signal
Used for general-purpose input.
Monitored in the I/O monitor field of MECHATROLINK-II.
−
+24VIN 6
Control power supply
for sequence signal
Control power supply input for sequence signals.
Allowable voltage fluctuation range: 11 to 25 V
Note: The 24 VDC power supply is not included.
3.4.1
BAT (+)
BAT (-)
14
15
Battery (
+) input signal
Battery (
−) input signal
Connecting pin for the absolute encoder backup battery.
Do not connect when the encoder cable with the battery case
is used.
3.6.2
4.7.1
/P-CL
/N-CL
Can be
allocated
Forward external
torque limit
Reverse external
torque limit
The allocation of an input signal to a pin can be changed in
accordance with the function required.
−