M-ii – Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors - MECHATROLINK-II Communications Reference User Manual
Page 36
1 Outline
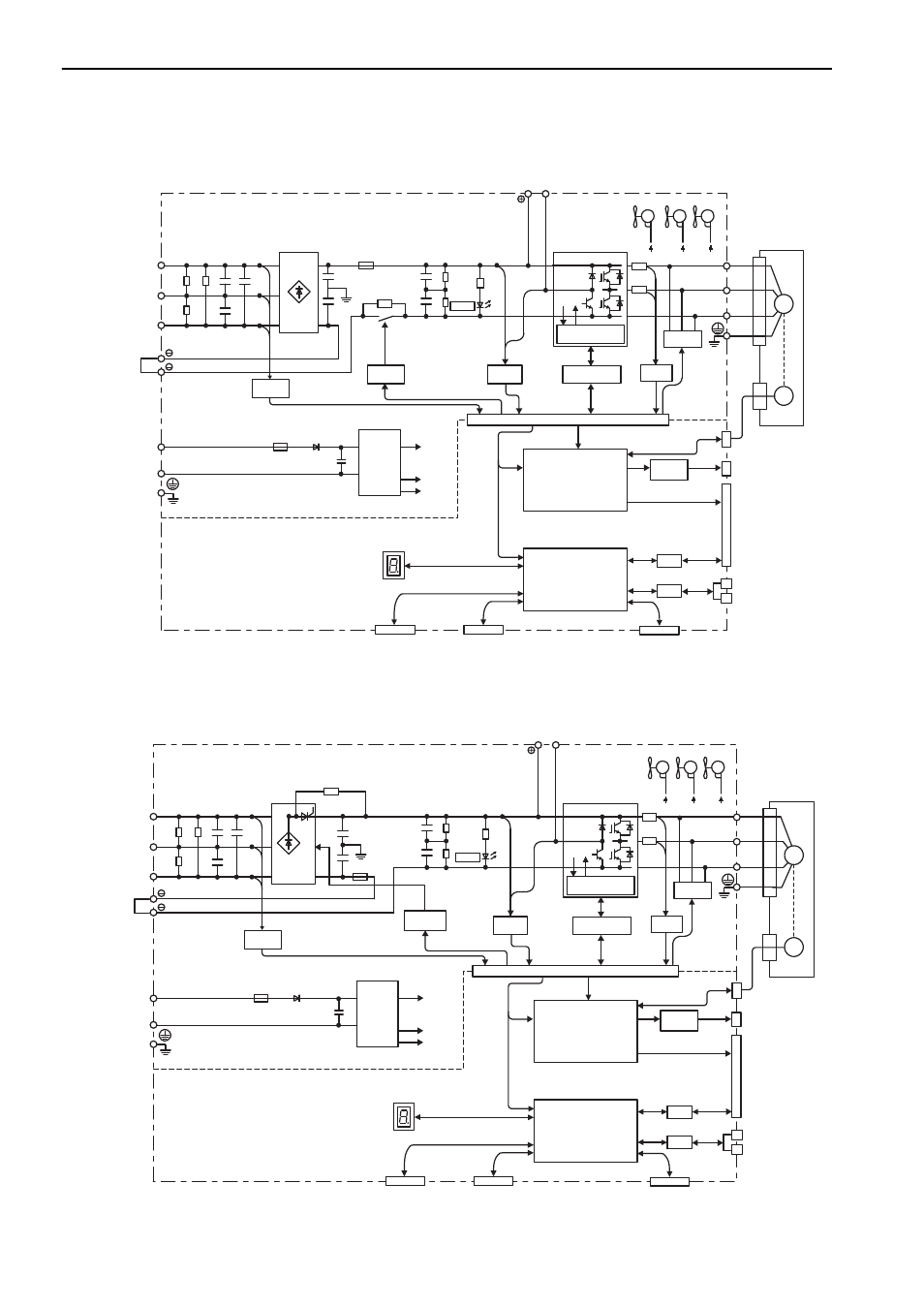
1.4.15 Three-phase 400 V, SGDV-210D11A, -260D11A Models
1-16
1.4.15 Three-phase 400 V, SGDV-210D11A, -260D11A Models
1.4.16 Three-phase 400 V, SGDV-280D11A, -370D11A Models
L1
B1/ B2
L2
L3
1
2
+24 V
0 V
U
V
W
ENC
M
CHARGE
+15 V
× 4
±12 V
+5 V
+24 V +24 V +24 V
Current
sensor
Dynamic
brake circuit
Servomotor
Gate
drive
Voltage
sensor
Voltage
sensor
Varistor
Relay
drive
Control
power
supply
Overheat protector,
overcurrent protector
Fan 1
Fan 2
Fan 3
+
–
+
–
+
–
Main circuit
power supply
Control power
supply
(The 24 VDC
power supply is
not included.)
CN3
CN7
CN8
CN2
I/O
I/F
CN1
CN6A
CN6B
CN5
MECHATROLINK-
II
communications
CPU
(Position/speed
calculation, etc.)
Panel display
Digital operator
Personal
computer
Signal for safety fuction
Encoder output
pulse
Analog monitor
output
ASIC
(PWM control, etc.)
Analog
voltage
converter
I/O signal
M-II
L1
B1/ B2
L2
L3
1
2
+24 V
0 V
U
V
W
ENC
M
CHARGE
+15 V
× 4
±12 V
+5 V
+24 V +24 V +24 V
Current
sensor
Dynamic
brake circuit
Gate
drive
Voltage
sensor
Voltage
sensor
Varistor
Control
power
supply
Overheat protector,
overcurrent protector
Fan 1
Fan 2
Fan 3
Thyristor
drive
Servomotor
+
–
+
–
+
–
Main circuit
power supply
Control power
supply
(The 24 VDC
power supply is
not included.)
CN3
CN7
CN8
CN2
I/O
I/F
CN1
CN6A
CN6B
CN5
MECHATROLINK-
II
communications
CPU
(Position/speed
calculation, etc.)
Panel display
Digital operator
Personal
computer
Signal for safety fuction
Encoder output
pulse
I/O signal
Analog monitor
output
ASIC
(PWM control, etc.)
Analog
voltage
converter
46