58 (1) risk assessment, 2) hard wire base block (hwbb) state, M-ii – Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors - MECHATROLINK-II Communications Reference User Manual
Page 143
4 Operation
4.9.1 Hard Wire Base Block (HWBB) Function
4-58
(1) Risk Assessment
When using the HWBB function, be sure to perform a risk assessment of the servo system in advance. Make
sure that the safety level of the standards is met. For details about the standards, refer to Harmonized Stan-
dards at the front of this manual.
Note: To meet the performance level d (PLd) in EN ISO 13849-1, the EDM signal must be monitored by a host controller.
If the EDM signal is not monitored by a host controller, the system only qualifies for the performance level c (PLc).
The following risks can be estimated even if the HWBB function is used. These risks must be included in the
risk assessment.
• The servomotor will move in an application where external force is applied to the servomotor (for example,
gravity on the vertical axis). Take measures to secure the servomotor, such as installing a mechanical brake.
• The servomotor may move within the electric angle of 180 degrees in case of the power module failure, etc.
Make sure that safety is ensured even in that situation. The rotation angle depends on the motor type. The
maximum rotation angle is given below.
Rotational motor: 1/6 rotation max. (rotation angle at the motor shaft)
Direct drive motor:1/20 rotation max. (rotation angle at the motor shaft)
• The HWBB function does not shut off the power to the SERVOPACK or electrically isolate it. Take mea-
sures to shut off the power to the SERVOPACK when performing maintenance on it.
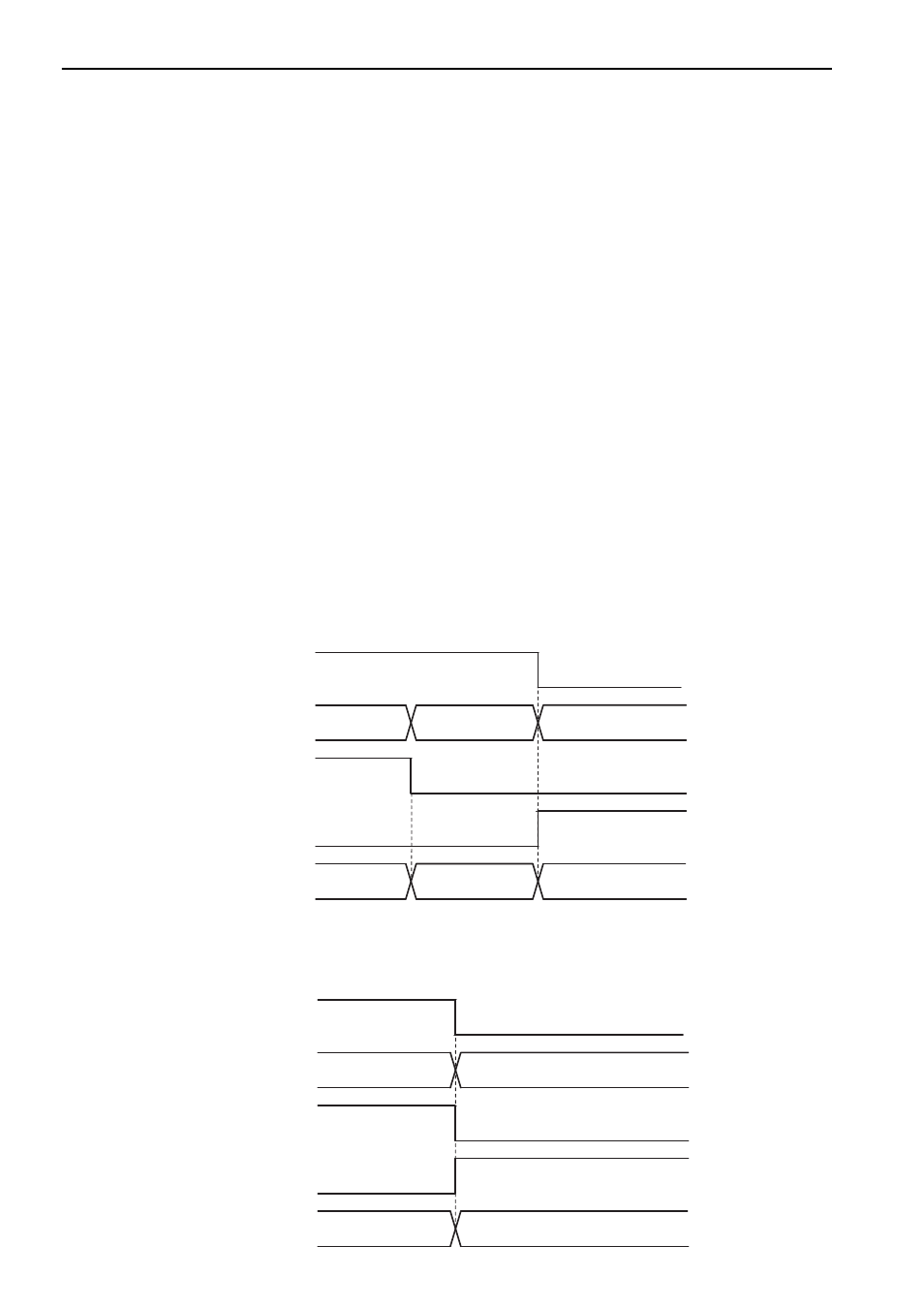
(2) Hard Wire Base Block (HWBB) State
The SERVOPACK will be in the following state if the HWBB function operates. If the /HWBB1 or /HWBB2
signal is OFF, the HWBB function will operate and the SERVOPACK will enter a hard wire baseblock
(HWBB) state.
/HWBB1
/HWBB2
M-
II
command
Status field
SVON
Motion
command, etc.
SV_OFF
command
1
0
0
1
SMON
command, etc.
IO monitor field
HBB
SERVOPACK
state
ON
(Nomal operation)
(Nomal operation)
OFF
(Motor current
shut-off request)
(Motor current shut-off request)
HWBB state
BB state
Operation
1
0
0
1
Motion
command, etc.
SMON
command, etc.
/HWBB1
/HWBB2
M-
II
command
Status field
SVON
IO monitor field
HBB
SERVOPACK
state
ON
OFF
HWBB state
Operation
The HWBB function operates after the servomotor power is turned OFF.
The HWBB function operates while the servomotor power is ON.
M-II