Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors - MECHATROLINK-II Communications Reference User Manual
Page 340
10 Appendix
10.1.2 Parameters
10-10
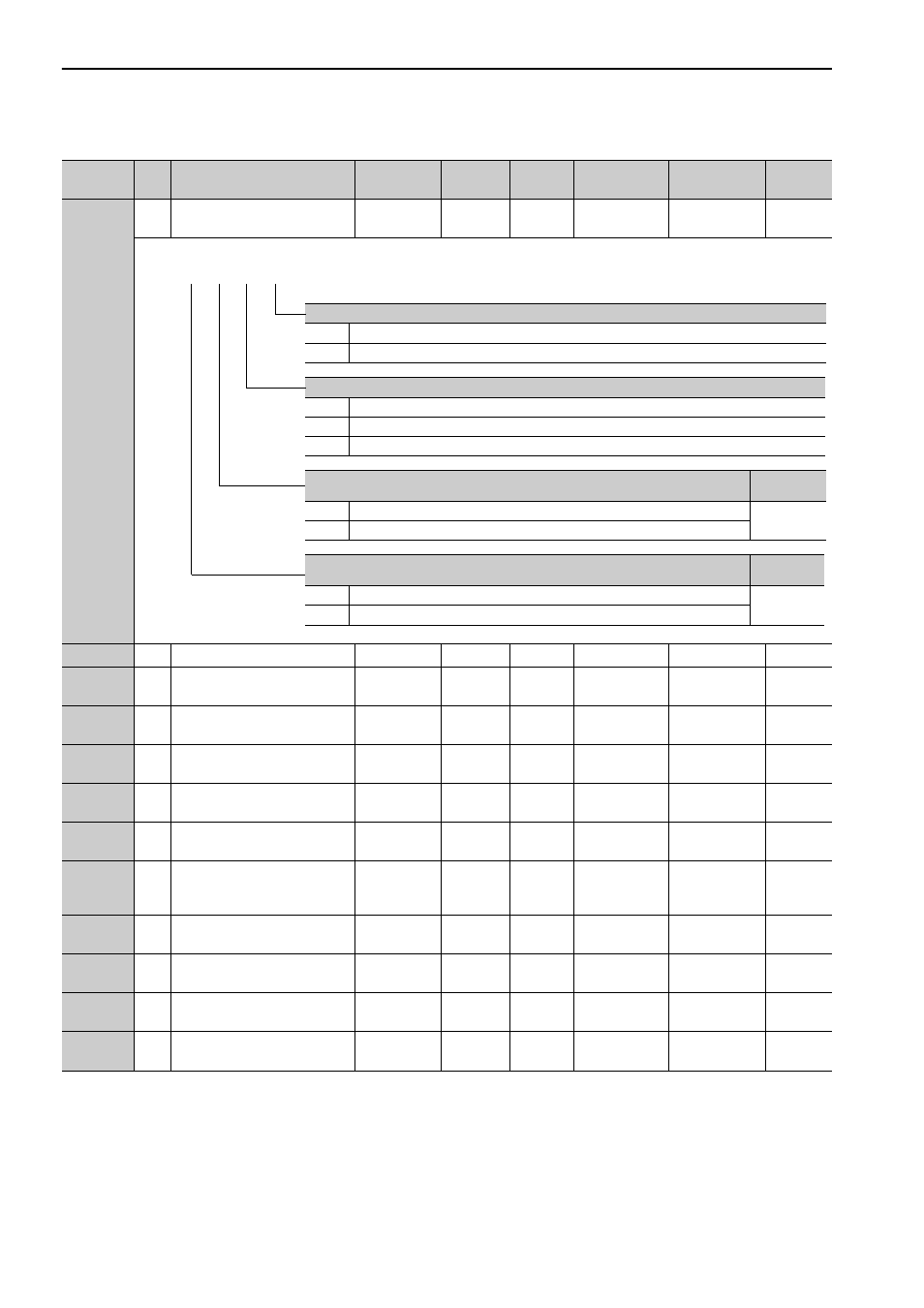
Pn140
2
Model Following Control
Related Switch
0000 to 1121
−
0100
Immediately
Tuning
−
Pn141
2
Model Following Control Gain 10 to 20000
0.1/s
500
Immediately
Tuning
−
Pn142
2
Model Following Control Gain
Compensation
500 to 2000
0.1%
1000
Immediately
Tuning
−
Pn143
2
Model Following Control Bias
(Forward Direction)
0 to 10000
0.1%
1000
Immediately
Tuning
−
Pn144
2
Model Following Control Bias
(Reverse Direction)
0 to 10000
0.1%
1000
Immediately
Tuning
−
Pn145
2
Vibration Suppression 1
Frequency A
10 to 2500
0.1 Hz
500
Immediately
Tuning
−
Pn146
2
Vibration Suppression 1
Frequency B
10 to 2500
0.1 Hz
700
Immediately
Tuning
−
Pn147
2
Model Following Control
Speed Feedforward
Compensation
0 to 10000
0.1%
1000
Immediately
Tuning
−
Pn148
2
2nd Model Following Control
Gain
10 to 20000
0.1/s
500
Immediately
Tuning
−
Pn149
2
2nd Model Following Control
Gain Compensation
500 to 2000
0.1%
1000
Immediately
Tuning
−
Pn14A
2
Vibration Suppression 2
Frequency
10 to 2000
0.1 Hz
800
Immediately
Tuning
−
Pn14B
2
Vibration Suppression 2
Compensation
10 to 1000
1%
100
Immediately
Tuning
−
(cont’d)
Parameter
No.
Size
Name
Setting
Range
Units
Factory
Setting
When
Enabled
Classification
Reference
Section
Model Following Control Selection
0
Does not use model following control.
1
Uses model following control.
Vibration Suppression Selection
0
Does not perform vibration suppression.
1
Performs vibration suppression over the specified frequency.
2
Performs vibration suppression over two different kinds of frequencies.
Vibration Suppression Adjustment Selection
Reference
Section
0
Does not adjust vibration suppression automatically using utility function.
5.3.1, 5.4.1,
5.5.1, 5.7.1
1
Adjusts vibration suppression automatically using utility function.
Selection of Speed Feedforward (VFF) / Torque Feedforward (TFF)
Reference
Section
0
Does not use model following control and speed/torque feedforward together.
5.3.1, 5.4.1
1
Uses model following control and speed/torque feedforward together.
4th 3rd 2nd 1st
digit digit digit digit
n.