Figure 4.10, Hand mode operation – Yaskawa iQpump Controller User Manual User Manual
Page 85
4.2 iQpump Drive Quick Start-Up Procedures
YASKAWA TM.iQp.06 iQpump Controller User Manual
85
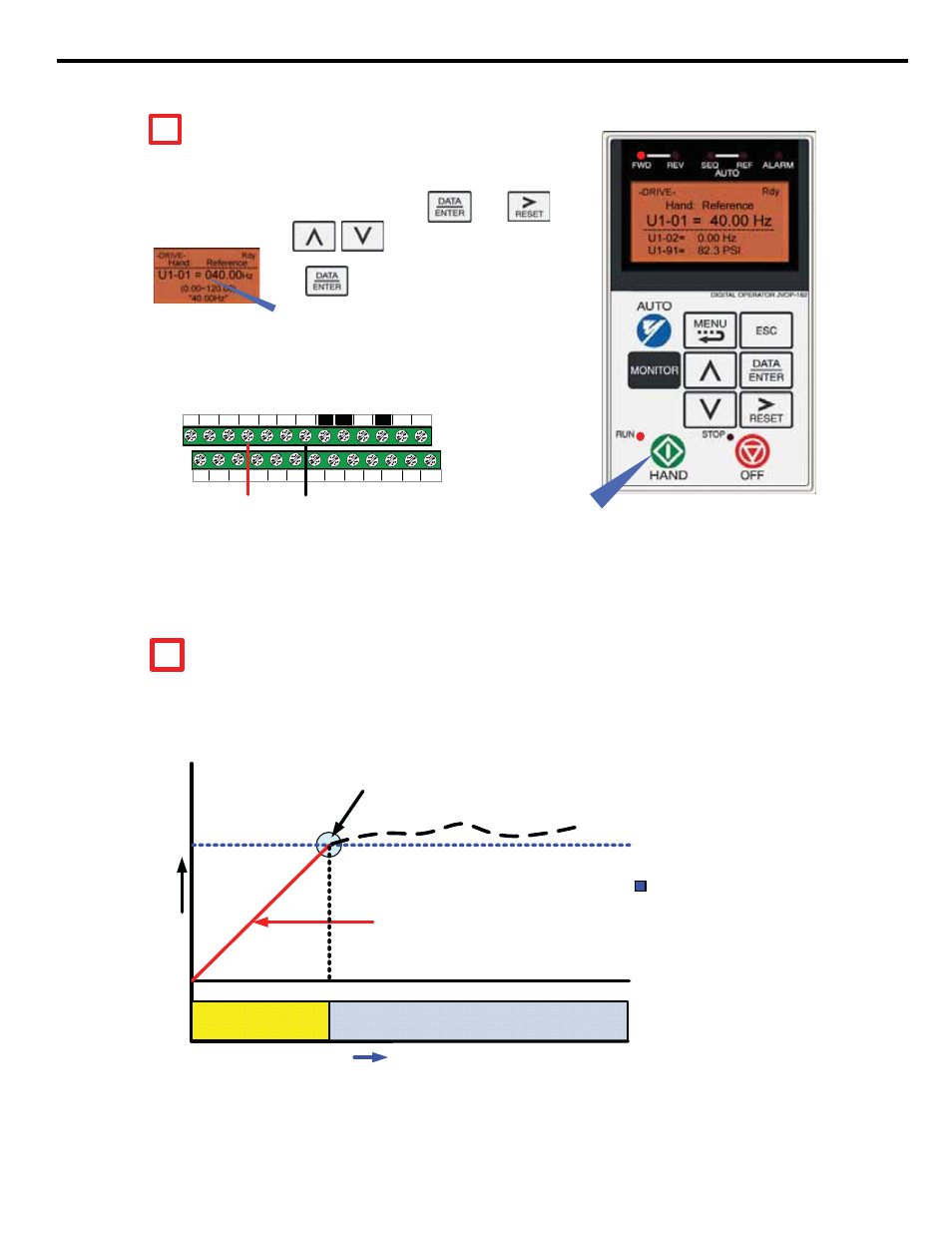
Figure 4.10
Figure 4.11
HAND MODE OPERATION
4
Hand Mode speed can be adjusted by pressing , use
to move the cursor and to adjust the hand speed reference
.
Press to save new active hand speed reference
.
Hand Speed from the Keypad/Digital Operator (Default)
Set parameter P 5-01 ‘Hand Mode Ref.’ to ‘0’ to adjust the hand mode
reference from an external 0 – 10V signal connected to terminal A1 and AC.
Hand Speed from Analog Input (0 – 10V)
S3
S5 S6 S7 FM AC AM IG
S2
S4
S1
S+
S-
SP
A2 +V AC
AC
SC
A1
SN
R+ R-
+
-
0 – 10V
Press the HAND KEY on the digital operator to run the system in Hand Mode .
‘0’ Blinking
HAND KEY
Note:
Hand Key can be disabled with parameter P 5-04
THRUST BEARING - SUBMERSIBLE MOTORS (e.g. Franklin)
When
using a submersible motor in combination with iQpump, it is recommended to use the Thrust Bearing
function to prevent excess motor wear . To enable this function, enter the minimum motor frequency in parameter
P4-05. Example: Minimum motor speed 1800 RPM, 1800 RPM ÷ 3600 RPM x 60.0 Hz =
30.0 Hz
Output Frequency
Ou
tp
u
t F
re
q
u
e
n
c
y
Thrust Bearing Frequency P 4-05
(Example 30.0 Hz)
Time
Thrust Bearing
Auto/Hand Operation
Turn Off Thrust Bearing Function
(Output Frequency Reached )
P4
-04
A
cce
l. Ti
m
e
Thrust Acceleration Time P 4-04
(Example 1.0 sec.)
C1-01 Acceleration Time
5
Note: Thrust Bearing Function is Enabled by Default