Yaskawa iQpump Micro User Manual
Page 132
Status
Drive Operation
Up (10)
Down (11)
Open
Closed
Decrease frequency reference
Closed
Closed
Hold current frequency reference
Note:
1. An oPE03 alarm occurs when only one of the Up/Down functions is programmed to a digital input.
2. An oPE03 alarm occurs when the Up/Down function is assigned to the terminals and a different digital input is programmed for the
Accel/decel ramp hold function. For more information on alarms,
Refer to Drive Faults, Alarms, Errors, and Messages on page
3. The Up/Down function can only be used for External reference 1. Consider this when using Up/Down and the external reference switching
command (H1-oo = 2).
Using the Up/Down Function with Frequency Reference Hold (d4-01)
• If the frequency reference hold function is disabled (d4-01 = 0), the Up/Down frequency reference will be reset to 0 when
the Run command is cleared or the power is cycled.
• When d4-01 = 1, the drive will save the frequency reference set by the Up/Down function. When the Run command or the
power is cycled, the drive will restart with the saved reference value. Close the Up or Down input without an active Run
command to reset the saved value.
Using the Up/Down Function with Frequency Reference Limits
Parameter d2-01 determines the upper frequency reference limit.
The value for the lower frequency reference limit depends on the parameter d4-10 setting. This value can be set by an analog
input or parameter d2-02. When a Run command is applied, the lower limits function as follows:
• If the lower limit is set by d2-02 only, the drive accelerates to this limit as soon as a Run command is entered.
• If the lower limit is determined by an analog input only, the drive accelerates to the limit when both the Run command and
an Up or Down command are active. The drive will not start running if only the Run command is active.
• If the lower limit is set by both an analog input and d2-02, and the analog limit is higher than the d2-02 value, the drive
accelerates to the d2-02 value when a Run command is input. When the d2-02 value is reached, the drive accelerates to the
analog limit only if an Up or Down command is set.
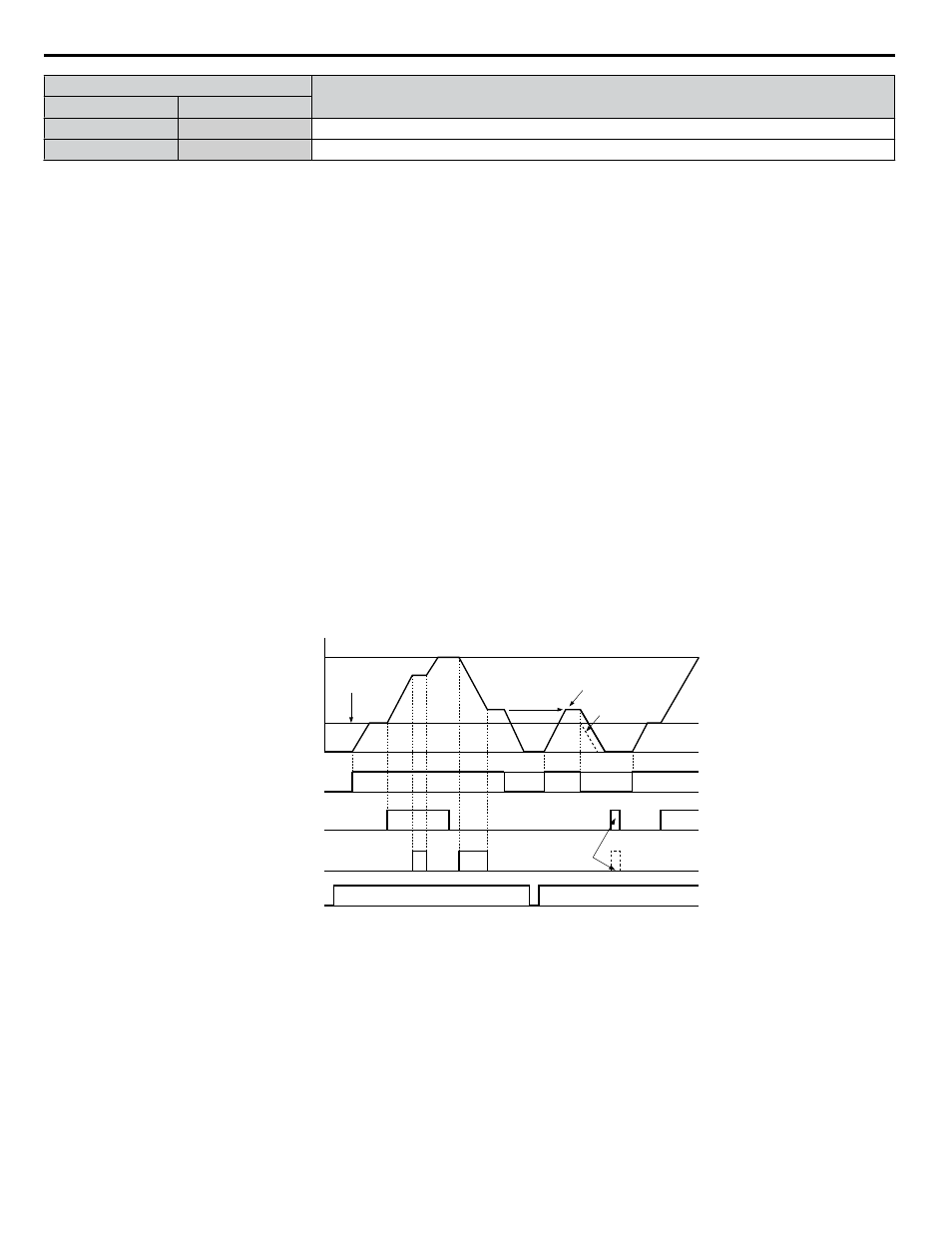
shows an Up/Down function example with a lower frequency reference limit set by d2-02, and the frequency
reference hold function both enabled and disabled.
Accelerates to
lower limit
Output frequency
upper limit
Lower limit
FWD run/stop
Up command
Down command
Power supply
Same
frequency
d4-01 = 1
d4-01 = 0
ON
ON
ON
ON
ON
Hold
frequency
reset
Figure 4.34 Up/Down Command Operation
Settings 12 and 13: Forward Jog, Reverse Jog
Digital inputs programmed as Forward Jog (H1-oo = 12) and Reverse Jog (H1-oo = 13) are Jog inputs that do not require
a Run command. Closing the terminal set for Forward Jog input will cause the drive to ramp to the Jog frequency reference
(d1-17) in the forward direction. The Reverse Jog will cause the same action in the reverse direction. The Forward Jog and
Reverse Jog command can be set independently.
Note:
The Forward Jog and Reverse Jog commands override all other frequency references. However, if the drive is set to prohibit reverse rotation
(b1-04 = 1), activating Reverse Jog will have no effect. Inputting both the Forward Jog and Reverse Jog are simultaneously for 500 ms or
longer will trigger an alarm will and the drive will ramp to stop.
4.8 Detailed iQpump Parameter Descriptions
132
YASKAWA TOEP YAIQPM 03B YASKAWA AC Drive - iQpump Micro User Manual