7 positioning near signal – Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors - Analog Voltage and Pulse Train Reference User Manual
Page 158
5 Operation
5.4.7 Positioning Near Signal
5-44
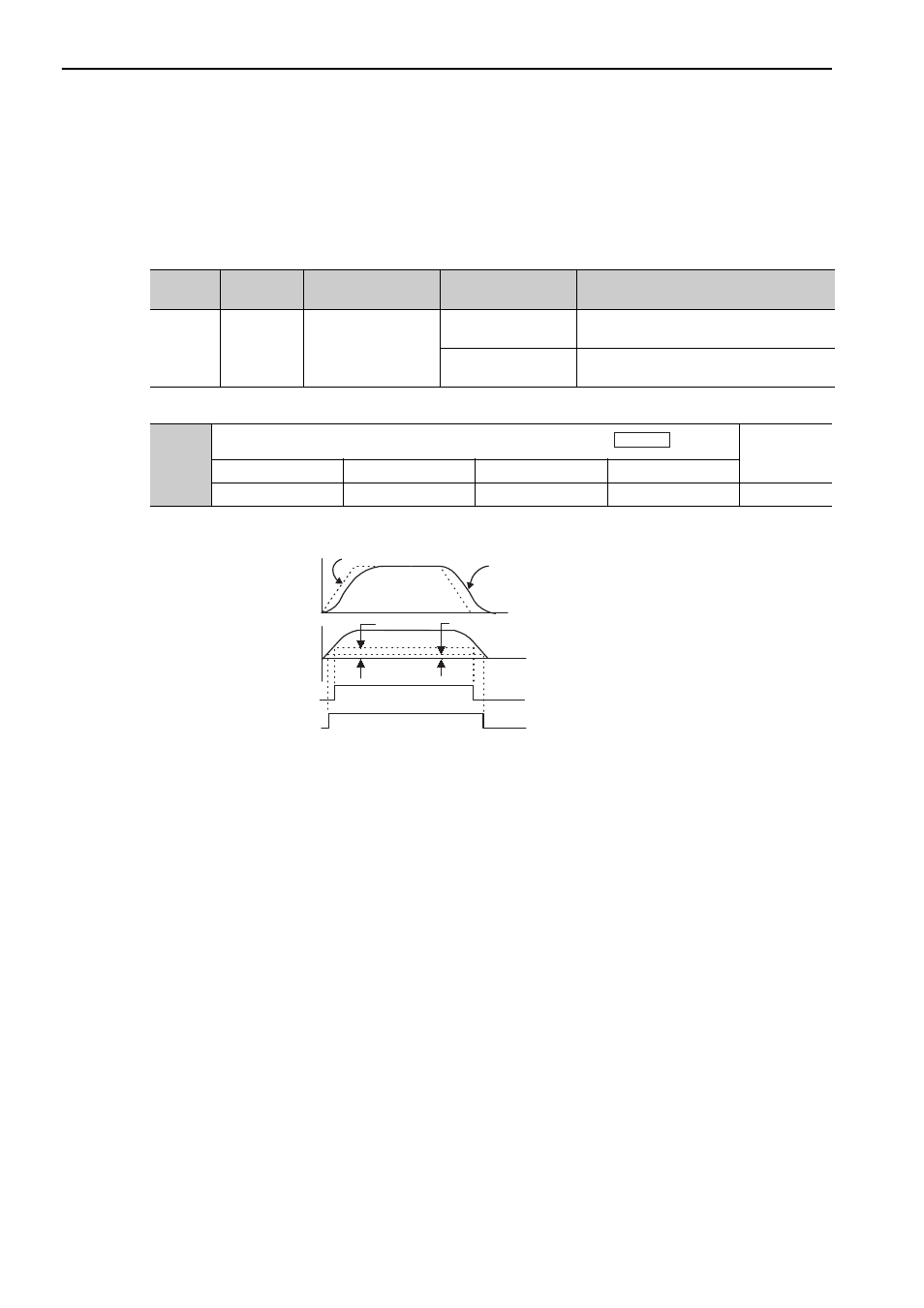
5.4.7 Positioning Near Signal
Before confirming that the positioning completed signal has been received, the host controller first receives a
positioning near signal and can prepare the operating sequence after positioning has been completed. The time
required for this sequence after positioning can be shortened.
This signal is generally used in combination with the positioning completed output signal.
Note: Use parameter Pn510.0 to allocate the /NEAR signal for use. Refer to 3.3.2 Output Signal Allocations for details.
The positioning near signal (/NEAR) is output when the difference between the number of reference pulses
output by the host controller and the travel distance of the servomotor (position error) is less than the set value.
Note: Normally, the value of Pn524 should be larger than that for the positioning completed width (Pn522).
Type
Signal
Name
Connector
Pin Number
Setting
Meaning
Output
/NEAR
Must be allocated
ON (closed)
The servomotor has reached a point near to
positioning completed.
OFF (open)
The servomotor has not reached a point near
to positioning completed.
Pn524
NEAR Signal Width
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
1 to 1073741824
1 reference unit
1073741824
Immediately
Setup
Position
Motor speed
Reference
Motor speed
Time
Time
Time
Effective at ON (close).
Effective at ON (close).
Time
Position error
/NEAR
/COIN
Pn524
Pn522
0