Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors - Analog Voltage and Pulse Train Reference User Manual
Page 372
10.3 Troubleshooting Malfunction Based on Operation and Conditions of the Servomotor
10-25
10
Trou
blesh
ooting
10.3 Troubleshooting Malfunction Based on Operation and
Conditions of the Servomotor
Troubleshooting for the malfunctions based on the operation and conditions of the servomotor is provided in
this section.
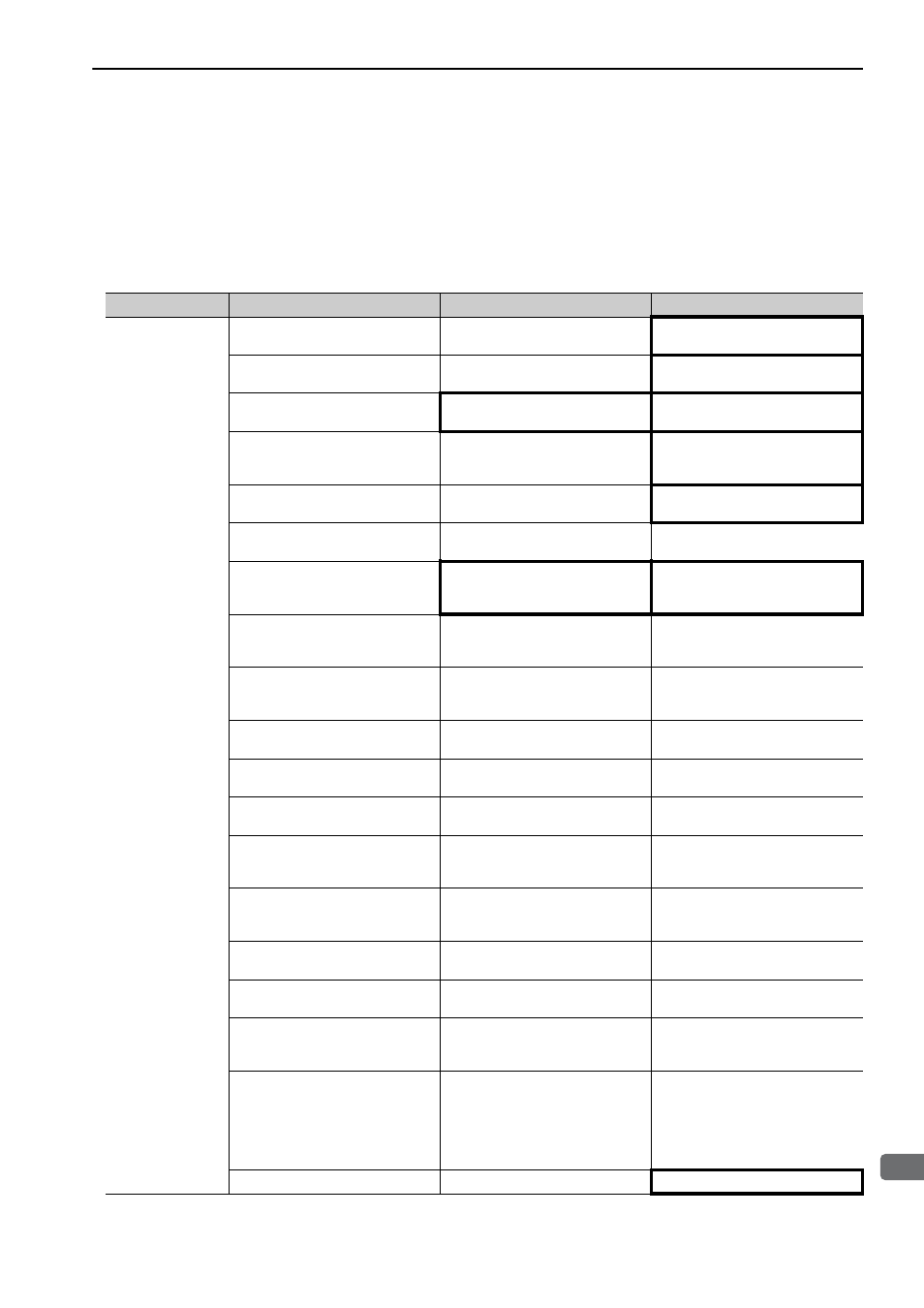
Be sure to turn OFF the servo system before troubleshooting items shown in bold lines in the table.
Problem
Probable Cause
Investigative Actions
Corrective Actions
Servomotor Does
Not Start
The control power supply is not
ON.
Check voltage between control
power terminals.
Correct the wiring.
The main circuit power supply is
not ON.
Check the voltage between main
circuit power terminals.
Correct the wiring.
Wiring of I/O signal connector CN1
is faulty or disconnected.
Check if the connector CN1 is prop-
erly inserted and connected.
Correct the connector CN1 connec-
tion.
Wiring for servomotor main circuit
cable or encoder cable is discon-
nected.
Check the wiring.
Correct the wiring.
Overloaded
Run under no load and check the
load status.
Reduce load or replace with larger
capacity servomotor.
Encoder type differs from parame-
ter setting (Pn002.2).
Check the settings for parameter
Pn002.2.
Set parameter Pn002.2 to the
encoder type being used.
Speed/position references not input Check the allocation status of the
input signals.
Allocate input signals so that the
speed/position reference is input
correctly.
Settings for the input signal selec-
tions (Pn50A to Pn50D) is incor-
rect.
Check the settings for parameters
Pn50A to Pn50D.
Correct the settings for parameter
Pn50A to Pn50D.
Servo ON signal (/S-ON) stays
OFF.
Check the settings for parameters
Pn50A.0 and Pn50A.1.
Set the parameters Pn50A.0 and
Pn50A.1 to turn the /S-ON signal
ON.
/P-CON input function setting is
incorrect.
Check the settings for parameter
Pn000.1.
Set parameters to match the applica-
tion.
SEN input is OFF.
Check the ON/OFF status of the
SEN input.
If using an absolute encoder, turn
the SEN input signal ON.
Reference pulse mode selection is
incorrect.
Check the Pn200.0 setting and the
reference pulse form.
Match the Pn200.0 setting and the
reference pulse form.
Speed control: Speed reference
input is incorrect.
Check V-REF and SG to confirm if
the control method and the input are
agreed.
Correct the control method selec-
tion parameter, and the input signal.
Torque control: Torque reference
input is incorrect.
Check V-REF and SG to confirm if
the control method and the input are
agreed.
Correct the control method selec-
tion parameter, and the input signal.
Position control: Reference pulse
input is incorrect.
Check Pn200.0 reference pulse
form and sign + pulse signal.
Correct the control method selec-
tion parameter, and the input signal.
Position error clear (/CLR) input
has not been turned OFF.
Check /CLR input signals (CN1-14
and -15).
Turn /CLR input signals OFF.
The forward run prohibited (P-OT)
and reverse run prohibited (N-OT)
input signals are turned OFF.
Check P-OT or N-OT input signal.
Turn P-OT or N-OT input signal
ON.
The safety input signal (/HWBB1 or
/HWBB2) remains OFF.
Check the /HWBB1 and /HWBB2
input signal.
Set the /HWBB1 and /HWBB2
input signal to ON.
When not using the safety function,
mount the safety function’s jumper
connector (provided as an acces-
sory) on the CN8.
A SERVOPACK fault occurred.
−
Replace the SERVOPACK.