Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors - Analog Voltage and Pulse Train Reference User Manual
Page 413
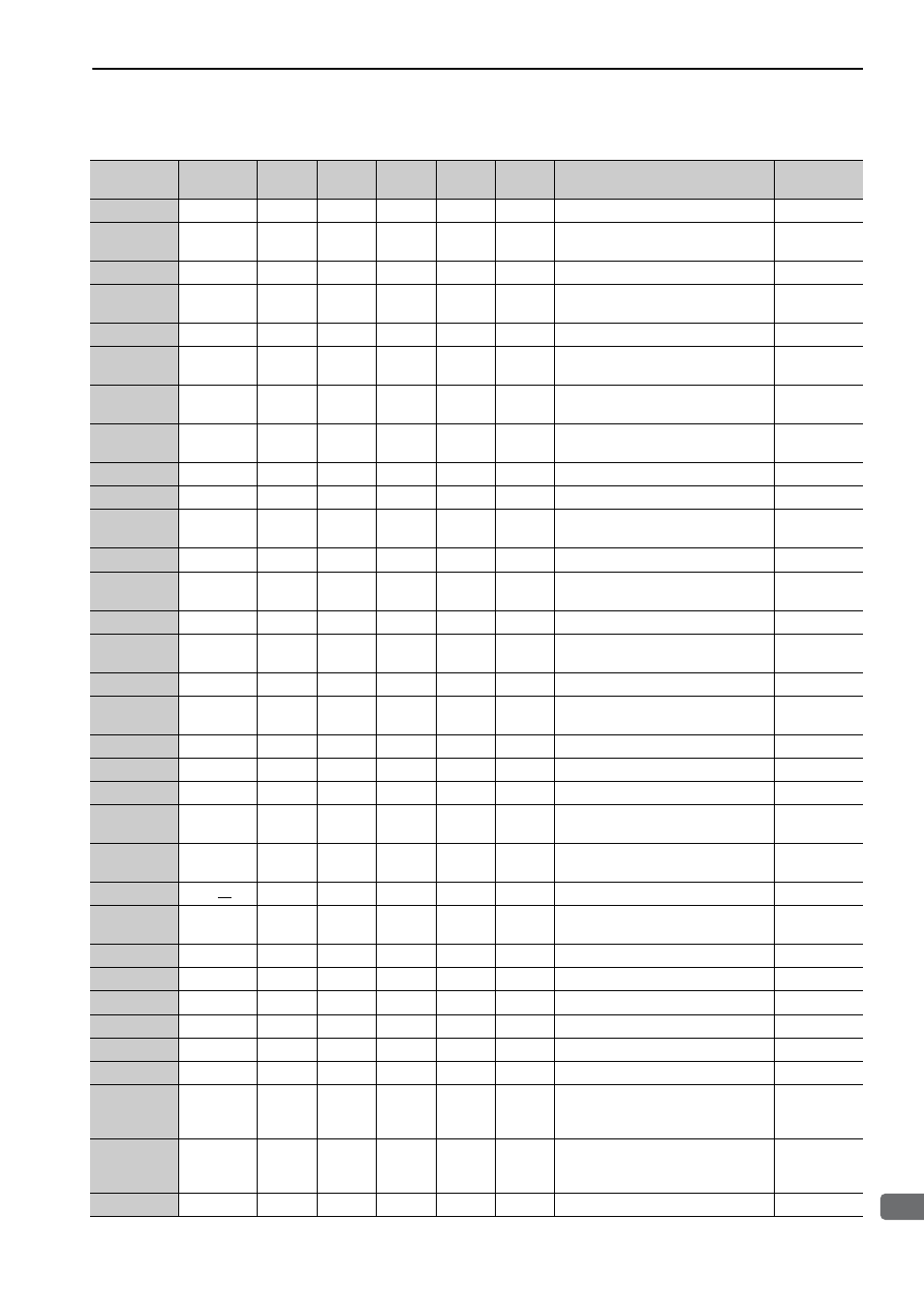
11.4 Parameter Recording Table
11-37
11
Ap
pend
ix
Pn136
0
Gain Switching Waiting Time 2
Immediately
Pn139
0000
Automatic Gain Changeover Related
Switch 1
Immediately
Pn13D
2000
Current Gain Level
Immediately
Pn140
0100
Model Following Control Related
Switch
Immediately
Pn141
500
Model Following Control Gain
Immediately
Pn142
1000
Model Following Control Gain Com-
pensation
Immediately
Pn143
1000
Model Following Control Bias
(Forward Direction)
Immediately
Pn144
1000
Model Following Control Bias
(Reverse Direction)
Immediately
Pn145
500
Vibration Suppression 1 Frequency A Immediately
Pn146
700
Vibration Suppression 1 Frequency B Immediately
Pn147
1000
Model Following Control Speed
Feedforward Compensation
Immediately
Pn148
500
2nd Model Following Control Gain
Immediately
Pn149
1000
2nd Model Following Control Gain
Compensation
Immediately
Pn14A
800
Vibration Suppression 2 Frequency
Immediately
Pn14B
100
Vibration Suppression 2 Compensa-
tion
Immediately
Pn14F
0011
Control Related Switch
After restart
Pn160
0010
Anti-Resonance Control Related
Switch
Immediately
Pn161
1000
Anti-Resonance Frequency
Immediately
Pn162
100
Anti-Resonance Gain Compensation
Immediately
Pn163
0
Anti-Resonance Damping Gain
Immediately
Pn164
0
Anti-Resonance Filter Time Con-
stant 1 Compensation
Immediately
Pn165
0
Anti-Resonance Filter Time Con-
stant 2 Compensation
Immediately
Pn170
1401
Tuning-less Function Related Switch
−
Pn200
0000
Position Control Reference Form
Selection Switch
After restart
Pn205
65535
Multiturn Limit Setting
After restart
Pn207
0000
Position Control Function Switch
After restart
Pn20A
32768
Number of External Scale Pitch
After restart
Pn20E
4
Electronic Gear Ratio (Numerator)
After restart
Pn210
1
Electronic Gear Ratio (Denominator)
After restart
Pn212
2048
Encoder Output Pulses
After restart
Pn216
0
Position Reference Acceleration/
Deceleration Time Constant
Immediately
after the
motor stops
Pn217
0
Average Movement Time of Position
Reference
Immediately
after the
motor stops
Pn218
1
Reference Pulse Input Multiplication
Immediately
(cont’d)
Parameter
Factory
Setting
Name
When
Enabled