2 external device monitor (edm1), Caution, Warning – Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors - Analog Voltage and Pulse Train Reference User Manual
Page 200: 86 (9) dynamic brake, 10) position error clear setting
5 Operation
5.11.2 External Device Monitor (EDM1)
5-86
(9) Dynamic Brake
If the dynamic brake is enabled in Pn001.0 (Stopping Method for Servomotor after /S-ON Signal is Turned
OFF), the servomotor will come to a stop under the control of the dynamic brake when the HWBB function
works while the /HWBB1 or /HWBB2 signal is OFF.
(10) Position Error Clear Setting
A position error in the HWBB state is cleared according to the setting in Pn200.2 for the clear operation selec-
tion.
If Pn200.2 is set to 1 (i.e., the position error is not cleared for position control), the position errors will be
accumulated unless the position reference from the host controller is canceled in the HWBB state, and the fol-
lowing conditions may result.
• A position error overflow alarm (A.d00) occurs.
• If the servo is turned ON after changing from HWBB state to BB state, the servomotor will move for the
accumulated position error.
Therefore, stop the position reference through the host controller while in HWBB state. If Pn200.2 is set to 1
(i.e., the position error is not cleared), input the clear (CLR) signal while in HWBB or BB state to clear the
position error.
(11) Servo Alarm Output Signal (ALM) and Alarm Code Output Signals (ALO1, ALO2,
and ALO3)
In the HWBB state, the servo alarm output signal (ALM) and alarm code output signals (AOL1, AOL2, and
AOL3) are not sent.
5.11.2 External Device Monitor (EDM1)
The external device monitor (EDM1) functions to monitor failures in the HWBB function. Connect the moni-
tor to feedback signals to the safety function device.
Note: To meet the performance level d (PLd) in EN ISO13849-1, the EDM signal must be monitored by a host controller.
If the EDM signal is not monitored by a host controller, the system only qualifies for the performance level c (PLc).
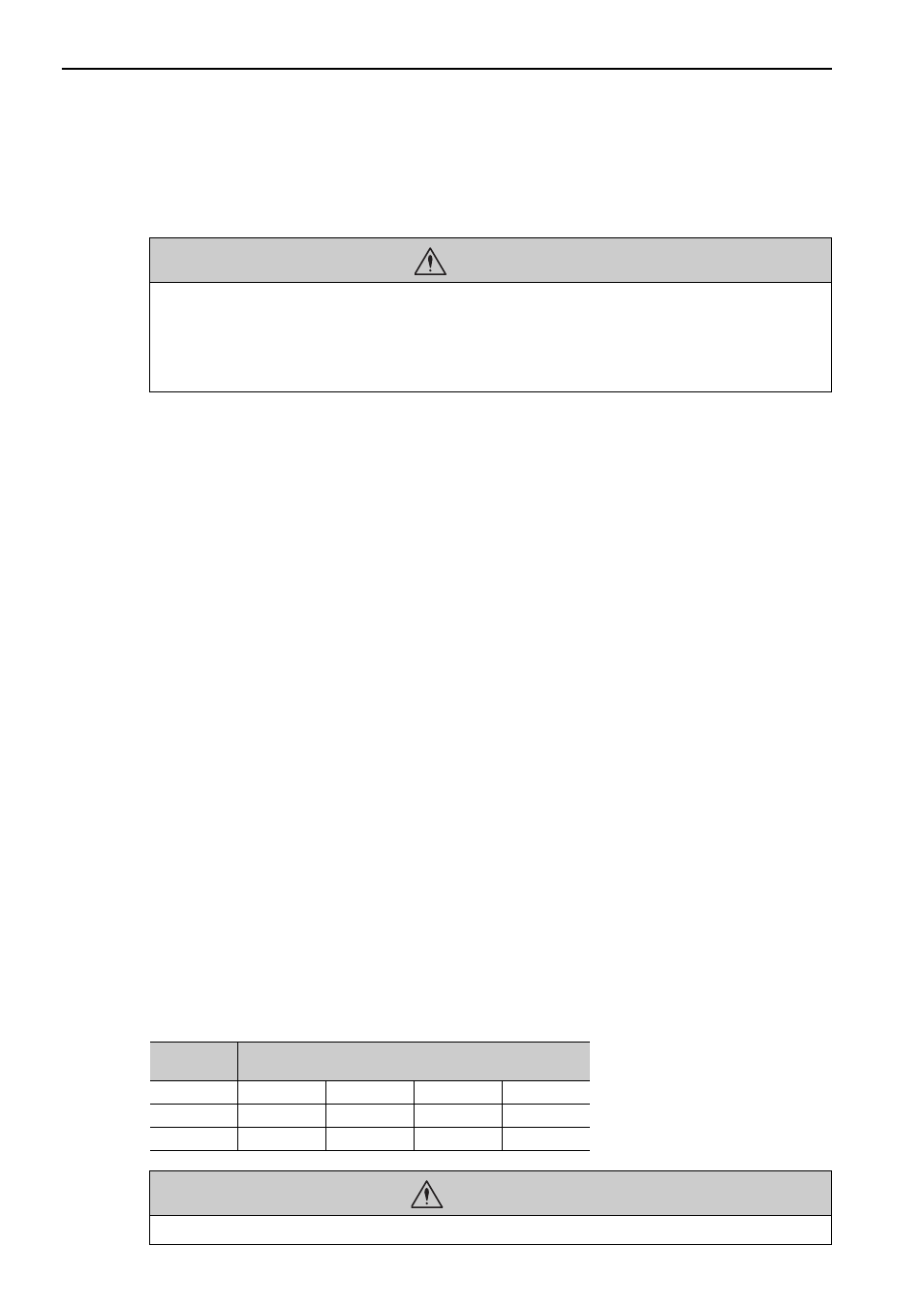
Failure Detection Signal for EDM1 Signal
The relation of the EDM1, /HWBB1, and /HWBB2 signals is shown below.
Detection of failures in the EDM1 circuit can be checked using the following four status of the EDM1 signal
in the table. Failures can be detected if the failure status can be confirmed, e.g., when the power supply is
turned ON.
CAUTION
• The dynamic brake is not a safety-related part of a control system. Be sure to design the system so that
the system will not be put into danger if the servomotor coasts to a stop in the HWBB state. Usually, use a
sequence in which the HWBB state occurs after the servomotor is stopped using the reference.
• If the application frequently uses the HWBB function, do not use the dynamic brake to stop the servomo-
tor. Otherwise element deterioration in the SERVOPACK may result. To prevent internal elements from
deteriorating, use a sequence in which the HWBB state occurs after the servomotor has come to a stop.
Signal
Name
Logic
/HWBB1
ON
ON
OFF
OFF
/HWBB2
ON
OFF
ON
OFF
EDM1
OFF
OFF
OFF
ON
WARNING
• The EDM1 signal is not a safety output. Use it only for monitoring a failure.