Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors - Analog Voltage and Pulse Train Reference User Manual
Page 387
11.2 List of Parameters
11-11
11
Ap
pend
ix
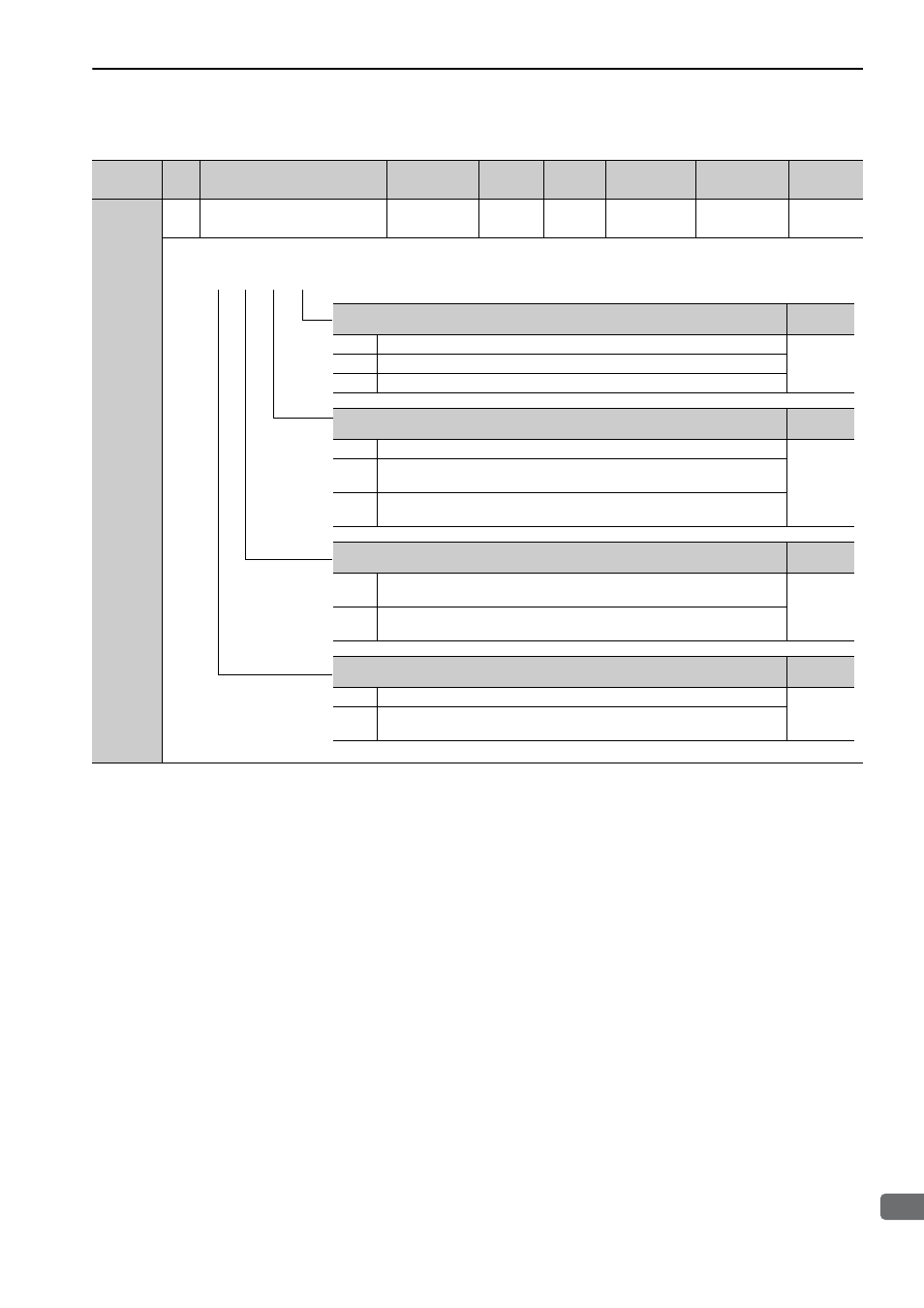
Pn001
2
Application Function Select
Switch 1
0000 to 1122
−
0000
After restart
Setup
−
(cont’d)
Parameter
No.
Size
Name
Setting
Range
Units
Factory
Setting
When
Enabled
Classification
Reference
Section
Servomotor power OFF or Alarm Gr.1 Stop Mode
Reference
Section
0
Stops the servomotor by applying DB (dynamic brake).
5.2.5
1
Stops the servomotor by applying DB and then releases DB.
2
Makes the servomotor coast to a stop state without using the DB.
Overtravel (OT) Stop Mode
Reference
Section
0
Stops in accordance with the setting of Pn001.0.
5.2.3
1
Sets the torque of Pn406 to the maximum value, decelerates the servomotor to a stop,
and then sets it to servolock state.
2
Sets the torque of Pn406 to the maximum value, decelerates the servomotor to a stop,
and then sets it to coasting state.
AC/DC Power Input Selection
Reference
Section
0
Applicable to AC power input: Input AC power supply through L1, L2, and L3
terminals.
3.1.4
1
Applicable to DC power input: Input DC power supply between B1/ + and
−2, or input
DC power supply between B1/ + and
−.
Warning Code Output Selection
Reference
Section
0
ALO1, ALO2, and ALO3 output only alarm codes.
5.10.2
1
ALO1, ALO2, and ALO3 output both alarm codes and warning codes. While warning
codes are output, ALM signal output remains ON (normal state).
4th 3rd 2nd 1st
digit digit digit digit
n.