9 compatible adjustment function, 1 feedforward reference, 2 torque feedforward – Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors - Analog Voltage and Pulse Train Reference User Manual
Page 269: 1) example of connection with host controller, Analog, Servopack in speed control
6 Adjustments
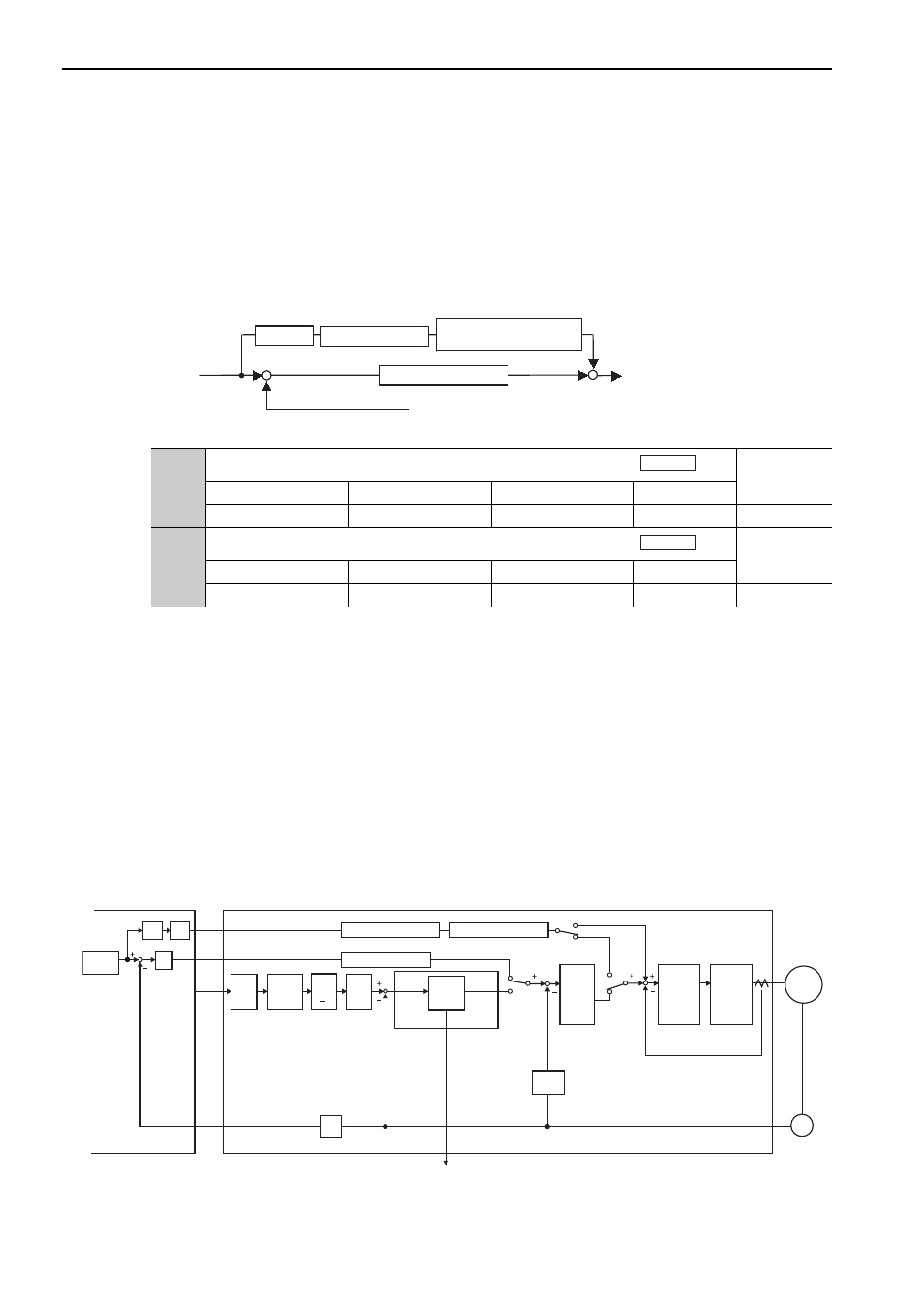
6.9.1 Feedforward Reference
6-66
6.9 Compatible Adjustment Function
The
Σ-V series SERVOPACKs have adjustment functions as explained in sections 6.1 to 6.8 to make machine
adjustments.
This section explains compatible functions provided by earlier models, such as the
Σ-III Series SERVOPACK.
6.9.1 Feedforward Reference
This function applies feedforward compensation to position control and shortens positioning time.
Note: Too high value may cause the machine to vibrate. For ordinary machines, set 80% or less in this parameter.
6.9.2 Torque Feedforward
The torque feedforward function shortens positioning time.
The host controller finds the difference from the position reference to generate a torque feedforward reference,
and inputs the torque feedforward reference together with the speed reference to the SERVOPACK.
(1) Example of Connection with Host Controller
Connect a speed reference to V-REF (CN1-5 and -6) and a torque feedforward reference to T-REF (CN1-9 and
-10) from the host controller.
SERVOPACK in Speed Control
∗ The reference pulse input multiplication switching function is supported by software version 001A or later.
Pn109
Feedforward Gain
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
0 to 100
1%
0
Immediately
Tuning
Pn10A
Feedforward Filter Time Constant
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
0 to 6400
0.01 ms
0
Immediately
Tuning
+
+ +
-
Pn109
Pn10A
Position
reference pulse
Feedback pulse
Position loop gain (Kp)
Feedforward Gain
Differential
Feedforward Filter
Time Constant
Analog
Position
Position
COIN
SERVOPACK (in speed control)
M
Divider
Pn200.0
Pn218
Pn20E
Pn210
Pn400
T-REF
V-REF
K
FF
K
P
Pn300
Pn415
Pn212
Pn216
Pn217
Pn002.0
ENC
Kp
KFF : Feedforward gain
: Position loop gain
Pn000.1
Pn000.1
Speed reference input gain
T-REF filter time constant
Position
reference
Differe-
ntial
Host controller
Servomotor
Torque reference input gain
Refer-
ence
pulse
form
Elec-
tronic
gear
Smooth-
ing
Position
feedback
Error
counter
Pn522
Positioning
completed width
Speed
conver-
sion
Speed
control
section
Current
control
section
Power
amplifier
Current feedback
Speed feedback
Position control
section
Encoder
output
pulse
B
A
*
Reference
Pulse
Multiplier
× n
45