9 compatible adjustment function, 1 feedforward reference, 2 using the mode switch (p/pi switching) – Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors User Manual
Page 196
5.9 Compatible Adjustment Function
5-59
Adjustments
5.9 Compatible Adjustment Function
The
Σ-V series SERVOPACKs have the adjustment functions explained in sections 5.1 to 5.8 that can be used
to make machine adjustments. This section explains compatible functions provided by earlier models, such as
the
Σ-III SERVOPACK.
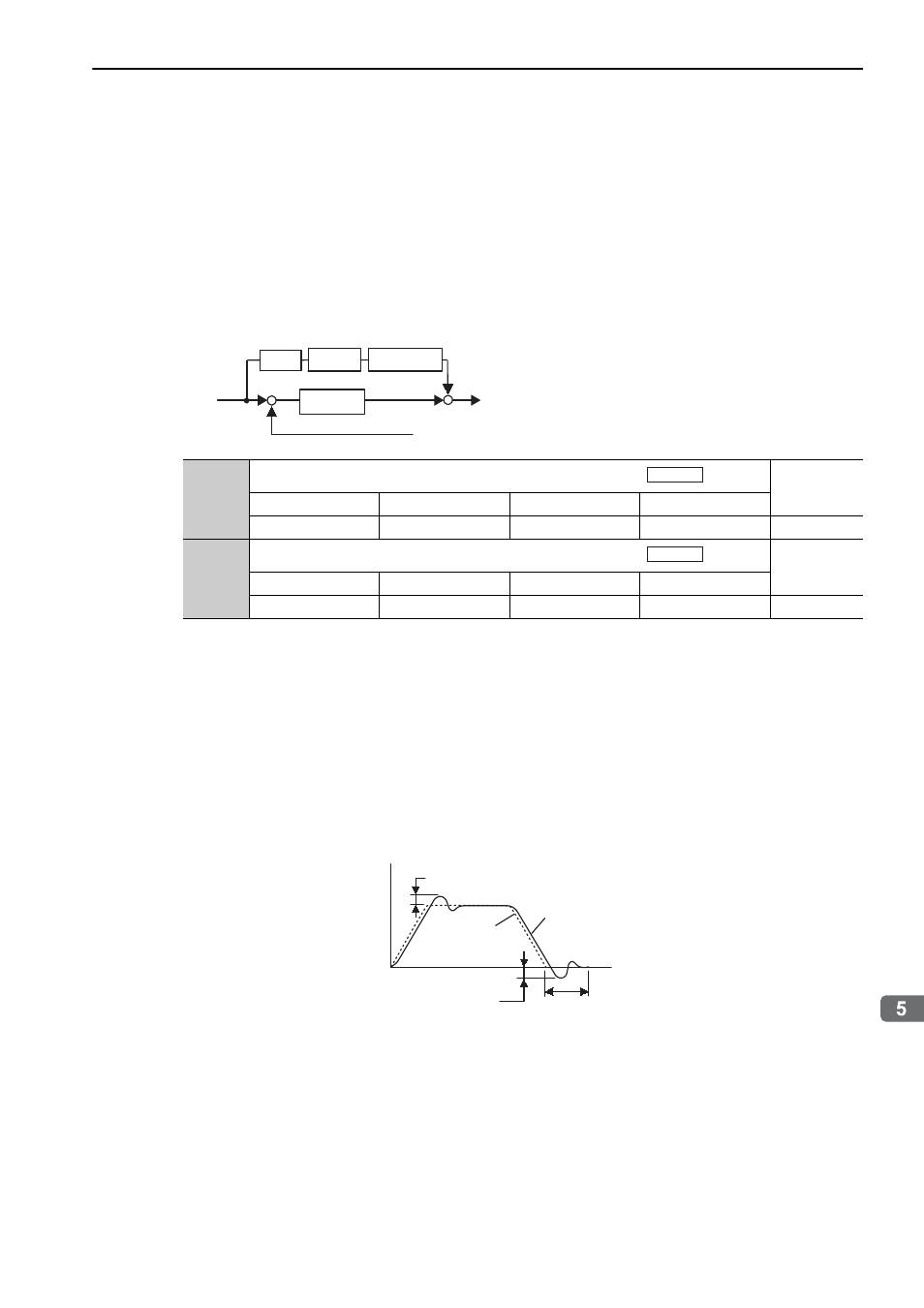
5.9.1 Feedforward Reference
Applies feedforward control compensation in position control inside the SERVOPACK. Use this parameter to
shorten positioning time.
If the Feedforward Gain (Pn109) is set to a value that is too high, the machine may vibrate. The gain setting
should be set to a value less than 80%.
5.9.2 Using the Mode Switch (P/PI Switching)
Use the mode switch (P/PI switching) function in the following cases:
• To suppress overshooting during acceleration or deceleration (for speed control)
• To over overshooting during positioning and reduce the settling time (for position control)
P Control: Proportional control
PI Control: Proportional/integral control
To enable the mode switch, set Pn10B.0 to 0 to 3. The mode switch changes the speed-control mode to PI
(proportional/integral) control or P (proportional) control.
Notes:
• Monitoring the speed response waveform and position error waveform is required for adjustment.
• If I-P control is selected for speed loop control, the mode switching function will be disabled.
Pn109
Feedforward Gain
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
0 to 100
1%
0
Immediately
Tuning
Pn10A
Feedforward Filter Time Constant
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
0 to 6400
0.01 ms
0
Immediately
Tuning
Position
reference
Encoder feedback pulse
+
+
-
Position loop
gain
㧔Kp㧕
Pn109
Pn10A
Differ-
ential
Feedforward
Gain
Feedforward Filter
Time Constant
Position
Position
Actual servomotor operation
Overshoot
Speed
Reference
Settling time
Overshoot
Time