16 (3) brake signal (/bk) allocation, 4) brake on timing after the servomotor stops, Mecha – Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors User Manual
Page 99
4 Operation
4.2.7 Holding Brakes
4-16
(3) Brake Signal (/BK) Allocation
Use parameter Pn50F.2 to allocate the /BK signal.
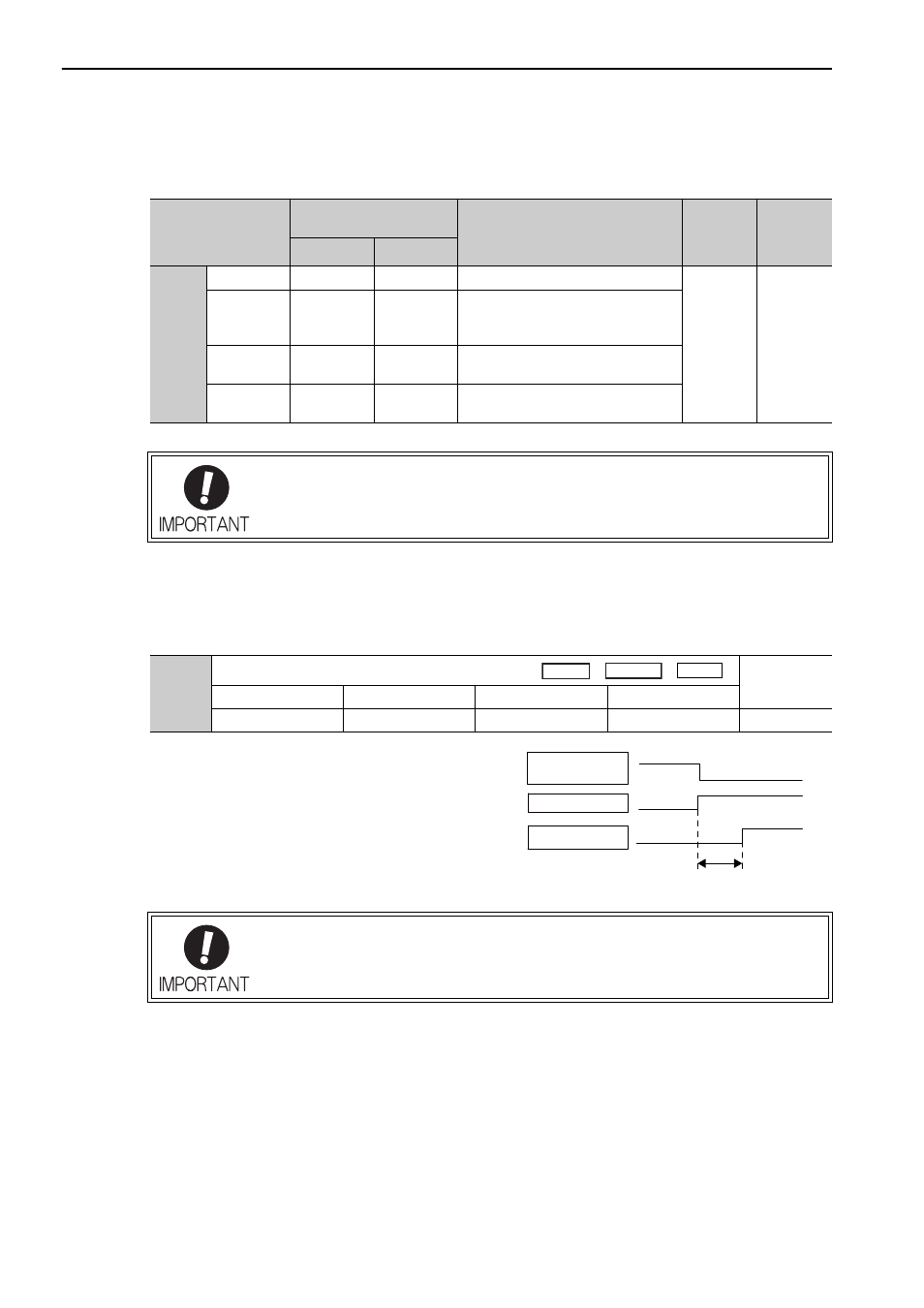
(4) Brake ON Timing after the Servomotor Stops
When the servomotor stops, the /BK signal turns OFF at the same time as the servo ON command is turned
OFF. Use parameter Pn506 to change the timing at which the servo ON command turns OFF and power is not
supplied to the motor.
Parameter
Connector
Pin Number
Meaning
When
Enabled
Classifica-
tion
+ Terminal
- Terminal
Pn50F
n. 0
–
–
The /BK signal is not used.
After
restart
Setup
n. 1
[Factory
setting]
CN1-1
CN1-2
The /BK signal is output from output
terminal CN1-1, 2.
n. 2
CN1-23
CN1-24
The /BK signal is output from output
terminal CN1-23, 24.
n. 3
CN1-25
CN1-26
The /BK signal is output from output
terminal CN1-25, 26.
When multiple signals are allocated to the same output terminal, the signals are output
with OR logic. For the /BK signal, do not use the output terminal that is already being
used for another signal.
Pn506
Brake Reference-Servo OFF Delay Time
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
0 to 50
10 ms
0
Immediately
Setup
Speed
Position
Torque
• When using the servomotor to control a vertical
axis, the machine movable part may shift slightly
depending on the brake ON timing due to gravity or
an external force. To eliminate this slight shift, set
parameter so that the power to the servomotor turns
OFF after the brake is applied.
• This parameter changes the brake ON timing while
the servomotor is stopped.
Servo ON
command
/BK output
Power to motor
Brake released
(ON)
Servo ON
Power to motor
Brake applied
(OFF)
Servo OFF
No power to motor
Pn506
MECHA
The servomotor will turn OFF immediately when an alarm occurs, regardless of the set-
ting of this parameter. The machine movable part may shift due to gravity or external
force before the brake operates.