Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors User Manual
Page 282
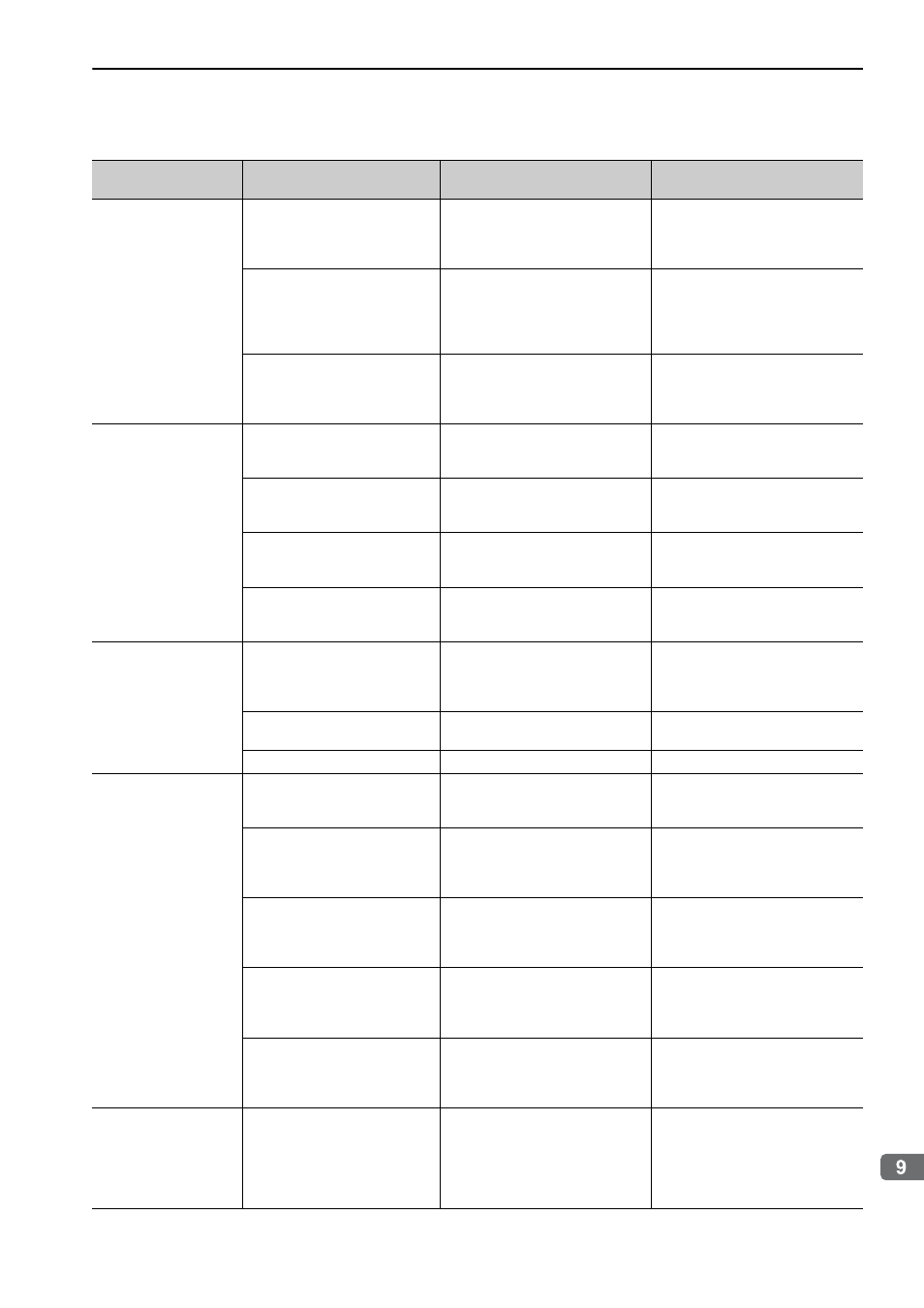
9.1 Troubleshooting
9-17
T
roubleshooting
A.CC0:
Multi-turn Limit
Disagreement
When using a direct-drive (DD)
servomotor, the multi-turn limit
value (Pn205) is different from
that of the encoder.
Check the value of the Pn205.
Correct the setting of Pn205 (0 to
65535).
The multi-turn limit value of the
encoder is different from that of
the SERVOPACK. Or, the multi-
turn limit value of the SERVO-
PACK has been changed.
Check the value of the Pn205 of the
SERVOPACK.
Execute Fn013 at the occurrence of
alarm.
A SERVOPACK fault occurred.
−
Turn the power supply OFF and
then ON again. If the alarm still
occurs, the SERVOPACK may be
faulty. Replace the SERVOPACK.
A.CF1
*2
:
Feedback Option
Module
Communications Error
(Reception error)
Wiring of cable between serial
converter unit and SERVOPACK
is incorrect or contact is faulty.
Check the external encoder wiring.
Correct the cable wiring.
The specified cable is not used
between serial converter unit and
SERVOPACK.
Confirm the external encoder wir-
ing specifications.
Use the specified cable.
Cable between serial converter
unit and SERVOPACK is too
long.
Measure the external encoder cable
length.
Use 20 m cable max.
Sheath of cable between serial
converter unit and SERVOPACK
is broken.
Check the external encoder cable.
Replace the cable.
A.CF2
*2
:
Feedback Option
Module
Communications Error
(Timer stop)
Noise interferes with the cable
between serial converter unit and
SERVOPACK.
−
Correct the wiring around serial
converter unit, e.g., separating
input/output signal line from main
circuit cable or grounding.
A serial converter unit fault
occurred.
−
Replace the serial converter unit.
A SERVOPACK fault occurred.
−
Replace the SERVOPACK.
A.d00:
Position Error Pulse
Overflow
(Position error exceeded
the value set in the
excessive position error
alarm level (Pn520))
The contact in the servomotor U,
V, and W wirings is faulty.
Check the motor main circuit cable
connection.
Confirm that there is no contact
fault in the motor wiring of encoder
wiring.
The frequency of the position ref-
erence is too high.
Reduce the reference frequency, and
operate the SERVOPACK.
Reduce the position reference fre-
quency or reference acceleration.
Or, reconsider the electronic gear
ratio.
The position reference accelera-
tion is too fast.
Reduce the reference acceleration,
and operate the SERVOPACK.
Apply the smoothing function, such
as using position reference accelera-
tion/deceleration time constant
(Pn216).
Setting of the Pn520 (Excessive
Position Error Alarm Level) is
low against the operating condi-
tion.
Check the alarm level (Pn520) to
see if it is set to an appropriate
value.
Set the Pn520 to proper value.
A SERVOPACK fault occurred.
−
Turn the power supply OFF and
then ON again. If the alarm still
occurs, the SERVOPACK may be
faulty. Replace the SERVOPACK.
A.d01:
Position Error Pulse
Overflow Alarm at
Servo ON
The servo ON command is
received when the number of
position error pulses is greater
than the set value of Pn526.
Check the error counter monitor
(Un008) while the servomotor
power is OFF.
Make the setting so that the position
error pulse is cleared when the
servo is OFF.
Or, correct the excessive position
error alarm level at servo ON
(Pn526).
∗2. This alarm may occur when a fully-closed option module is mounted.
(cont’d)
Alarm:
Alarm Name
Cause
Investigative Actions
Corrective Actions