Programming 93 – Yaskawa F7 Drive Programming Manual User Manual
Page 101
Programming 93
Function: Torque Detection 1 N.C.
Setting: 17
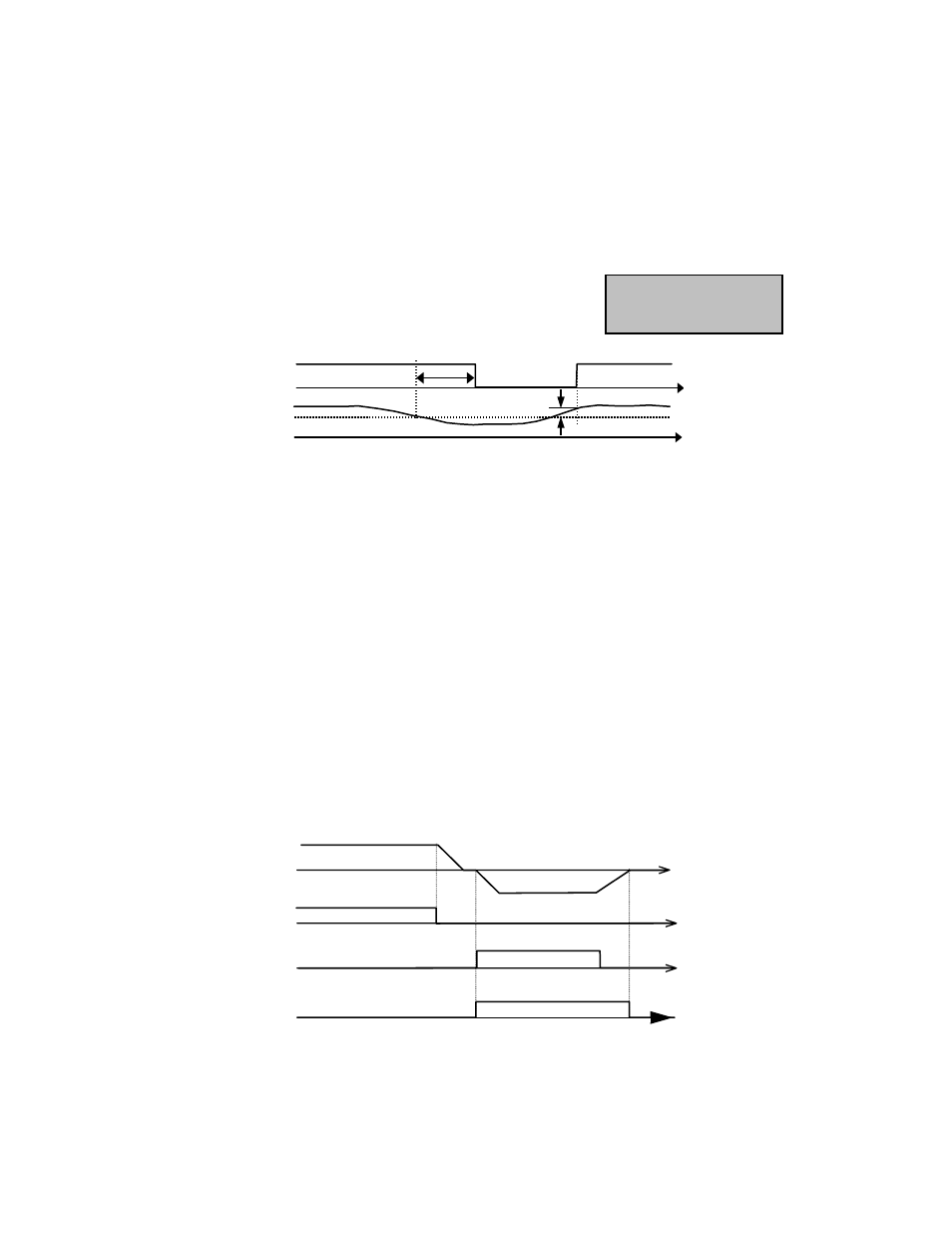
The Torque Detection 1 function ties a digital output to the overtorque/undertorque sensing capabilities of the Drive. If a
digital output is configured as Torque Detection 1 N.C., whenever the output current exceeds the level of L6-02 for at least the
length of time set in L6-03, the digital output will open.
The torque detection function has a built-in hysteresis of 10% of the Drive rated output current.
Fig. 61 Torque Detection 1 N.C. Timing Diagram
Function: Torque Detection 2 N.O.
Setting: 18
Function: Torque Detection 2 N.C.
Setting: 19
The Torque Detection 2 N.O. and Torque Detection 2 N.C. functions tie the digital output to the overtorque/undertorque
sensing capabilities of the Drive. If a digital output is configured as Torque Detection 2 N.O. or Torque Detection 2 N.C.,
whenever the output current exceeds the level of L6-05 for at least the length of time set in L6-06, the digital output will close
or open, respectively.
Function: Reverse Direction
Setting: 1A
The Reverse Direction digital output will close whenever the Drive is turning the motor in the direction that corresponds to the
reverse direction (CW or CCW). The Reverse Direction digital output will remain closed during deceleration when the
rotation is in the reverse direction.
Fig. 62 Reverse Direction Timing Diagram
Undertorque Detection
Signal
t
L6-03
L6-02
t
Output Current
b
ON (Closed)
OFF (Open)
L6-01 = 5,6,7, or 8
L6-02 = TD Level 1
L6-03 = TD Delay Time 1
b = 10% of Drive rated current
TIME
Output Frequency
Fwd RUN
Rev RUN
Reverse Dir Output
ON (Closed)
ON (Closed)
ON (Closed)
OFF (Open)
OFF (Open)
t
OFF (Open)
Reverse Dir Output
TIME