Programming 45 – Yaskawa F7 Drive Programming Manual User Manual
Page 53
Programming 45
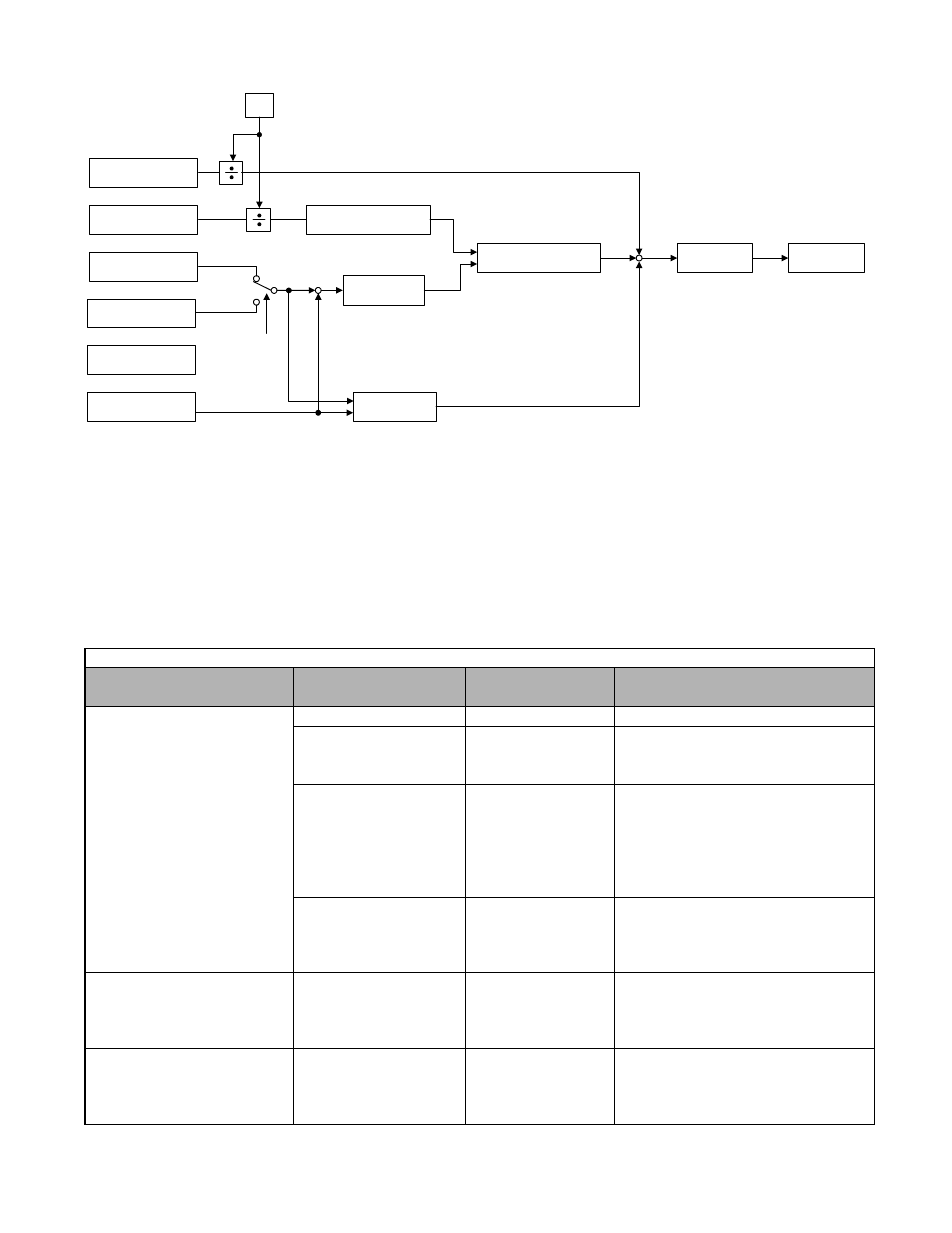
Fig. 35 Torque Control Block Diagram
Speed Limiter and Priority Circuit (Speed Limit Function)
If the external torque reference and load are not balanced during torque control, the motor will accelerate in either the forward
or reverse direction. The speed limit function is used to limit the speed to a specified value, which consists of the speed limiter
circuit and priority circuit.
There are two ways to set a speed limit: using an input from an analog input terminal and setting a speed limit in d5-04. The
input methods for speed limit are listed in the following table.
Table 6 Speed Limit
Speed Limit
Input Method
Reference Source
Parameter Setting
Remarks
Voltage Input (0 to +/- 10 V)
Set in d5-04
d5-03 = 2
-
Terminal A1 - AC
d5-03 = 1
b1-01 = 1
H3-01 = 1
Set H3-01 to 0 if the speed limit is always
to be positive.
Terminal A2 - AC
d5-03 = 1
b1-01 = 0
H3-08 = 1
H3-09 = 1
The value will be added to the value input
on A1 to set the speed limit.
Set H3-03 to 0 if the speed limit input on
A2 is always to be positive.
Turn OFF (V side) pin 2 of switch S1 on
the terminal board.
Terminal A3 - AC
d5-03 = 1
b1-01 = 0
H3-04 = 1
H3-05 = 1
The value will be added to the value input
on A1 to set the speed limit.
Set H3-07 to 0 if the speed limit input on
A3 is always to be positive.
Current Input (4 to 20 mA)
Terminal A2 - AC
d5-03 = 1
b1-01 = 0
H3-08 = 2
H3-09 = 1
The value will be added to the value input
on A1 to determine the speed limit.
Turn ON pin 2 of switch S1 on the terminal
board.
Option Board (AI-14B)
(0 to +/-10 V)
TC1 - TC4
d5-03 = 1
b1-01 = 3
F2-01 = 0
If H3-009 is set to 0, the sum of the input
between TC2 and TC4 will be added to the
input between TC1 and TC4 to determine
the speed limit.
Torque com pensation
from analog input
T orque reference from
analog input
Speed lim it
b1-01
Speed lim it
d5-04
Speed lim it bias
d5-05
Speed feedback
Flux
Torque prim ary delay filter
d5-02
Speed controller
(A SR )
P riority circuit
Speed lim iter
+
+
+
+
-
d5-03
Torque Lim it
Internal torque
reference
R efer to torque lim it setting
via param eters and analog input
Torque compensation
from analog input
Speed limit
b1-01
Torque reference from
analog input
Speed limit
d5-04
Speed limit bias
d5-05
Speed feedback
Torque primary delay filter
d5-02
Speed controller
(ASR)
Priority circuit
Speed limiter
Flux
d5-03
Torque Limit
Internal torque
reference
Refer to torque limit setting
via parameters and analog input