Programming 128 – Yaskawa F7 Drive Programming Manual User Manual
Page 136
Programming 128
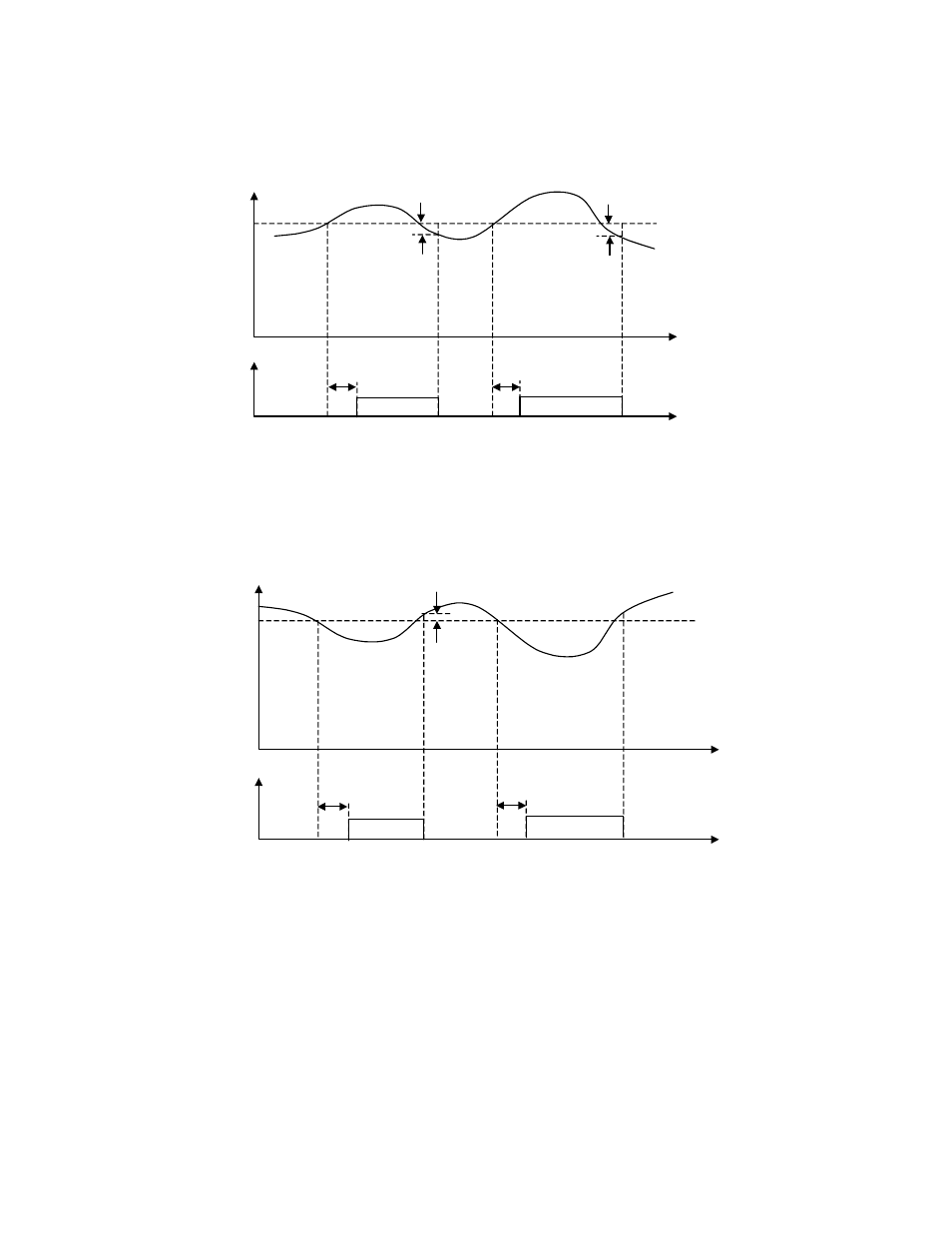
After selecting the proper detection scheme the Torque Detection Level (L6-02) must be specified. If the current level read by
the output current transformers rises above (overtorque) or drops below (undertorque) this level, and remains there for at least
the Torque Detection Time (L6-03), then the Torque Detection Function will change the state of any digital output configured
for Torque Detection (H2-0x = “B: Torque Detection 1 N.O.”, or “17: Torque Detection 1 N.C.”).
Fig. 92 Over Torque Detection
Fig 93 Under Torque Detection
Out
pu
t
Curre
n
N
or
m
ally
Ope
n T
orque
Det
ec
tio
n
Di
gi
tal
Ou
tp
ut
t
CLOSED
L6-03
L6-03
L6-02
*
*
* When the output current drops below the Torque Detection Level by
approximately 10% of the Drive’s rated output current the digital output is reset.
Closed
Open
Torque detection level -10%
TIME
Cur
rent
L6-02
Out
put
Current
Normally
Open
T
orq
ue
Det
ec
tion
Di
gi
ta
l
Out
put
L6-03
L6-03
L6-02
*
* When the output current rises above the Torque Detection Level by
approximately 10% of the Drive’s rated output current the digital output is reset.
*
t
t
Closed
Open
Torque detection level 10%
TIME