Programming 77 – Yaskawa F7 Drive Programming Manual User Manual
Page 85
Programming 77
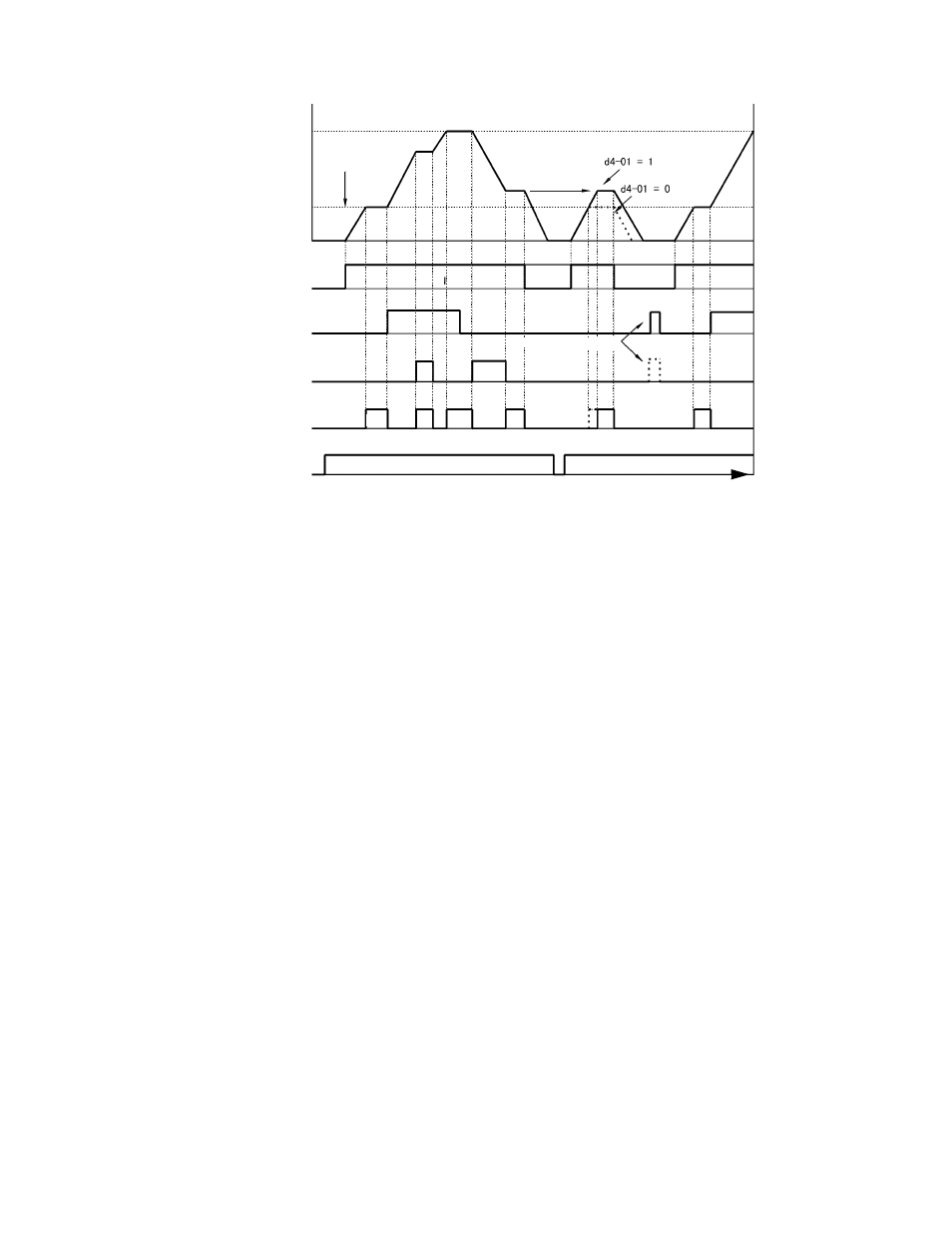
Fig. 48 Floating Point Control Time Chart
Function: Forward Jog
Setting: 12
Function: Reverse Jog
Setting: 13
Digital inputs programmed as Forward Jog (H1-0x= 12) and Reverse Jog (H1-0x= 13) will be Jog inputs that do not require a
Run command. Closing the Forward Jog input will cause the Drive to ramp to the Jog Frequency Reference (d1-17) in the Fwd
direction. The Reverse Jog will cause the same action in the Rev direction. The Forward Jog and Reverse Jog can be set
independently.
The Forward and Reverse Jog inputs will have priority over other frequency references but the Reverse Jog input will not
function if Reverse Operation is disabled (b1-04= “1: Reverse Disabled”).
If both the Forward Jog and Reverse Jog are input simultaneously for 500 ms or more an external fault will occur and the Drive
will stop, using the method set by b1-03.
Function: Fault Reset
Setting: 14
Whenever the Drive detects a fault condition, the fault output contact will close and the Drive’s output will shut OFF causing
the motor to coast (specific stopping methods can be selected for some faults such as L1-04 for motor overheat). Once the Run
command is removed, the fault can be reset by either the RESET key on the digital operator or by closing a digital input
configured as a Fault Reset (H1-0x= 14).
Output frequency
Upper limit
Accelerates to
lower limit
Same
frequency
Lower limit
Forward run/stop
Increase command
Decrease command
Frequency
matching output*
Reference
frequency reset
Power supply
* The frequency matching signal turns ON when the motor is not accelerating/
decelerating while the Run command is ON.
ON
ON
ON
ON
OFF
OFF
OFF
OFF
(CLOSED)
(CLOSED)
(CLOSED)
(CLOSED)
(CLOSED)
ON
OFF
(OPEN)
(OPEN)
(OPEN)
(OPEN)
(OPEN)
TIME