Programming 185, Hunting prevention, Afr tuning – Yaskawa F7 Drive Programming Manual User Manual
Page 193: High slip braking, Table a.1 f7 parameter list (continued)
Programming 185
L8-15
OL2 Characteristic Selection
at Low Speeds
OL2 Sel @ L-Spd
This parameter assists in protecting the output transistors from
overheating when output current is high and output frequency is
low (6Hz and less).
0: Disabled
1: Enabled (L8-18 is active)
0 to 1
0
A
A
A
A
L8-18
Soft CLA Selection
Soft CLA Sel
Enables and disables the software current limit function. Consult
the factory before disabling.
0: Disabled
1: Enabled
0 to 1
1
A
A
A
A
Hunting Prevention
n1-01
Hunting Prevention Selection
Hunt Prev Select
If the motor vibrates while lightly loaded, hunting
prevention may reduce the vibration.
0: Disabled
1: Enabled
0 to 1
1
A
A
-
-
n1-02
Hunting Prevention Gain
Setting
Hunt Prev Gain
Sets the gain for the Hunting Prevention Function.
If the motor vibrates while lightly loaded and n1-01=1, increase the
gain by 0.1 until vibration ceases.
If the motor stalls while n1-01=1, decrease the gain by 0.1 until the
stalling ceases.
0.00 to
2.50
1.00
A
A
-
-
AFR Tuning
n2-01
Speed Feedback Detection
Control (AFR) Gain
AFR Gain
Sets the internal speed feedback detection control gain in the
automatic frequency regulator (AFR).
Normally, there is no need to change this setting.
Adjust this parameter as follows:
• If hunting occurs, increase the set value.
• If response is low, decrease the set value.
Adjust the setting by 0.05 units at a time, while checking the
response.
0.00 to
10.00
1.00
-
-
A
-
n2-02
Speed Feedback Detection
Control (AFR) Time
Constant
AFR Time
Sets the time constant to control the rate of change in the speed
feedback detection control.
0 to
2000
50ms
-
-
A
-
n2-03
Speed Feedback Detection
Control (AFR) Time
Constant 2
AFR Time 2
Sets the time constant to control the amount of change in the speed
at low speed.
0 to
2000
750ms
-
-
A
-
High Slip Braking
n3-01
High Slip Braking
Deceleration Frequency
Width
HSB Decel Width
Sets how aggressively the Drive decreases the output frequency as
it stops the motor using high slip braking (HSB). If Overvoltage
(OV) faults occur during HSB, this parameter may need to be
increased.
1 to 20
5%
A
A
-
-
n3-02
High Slip Braking Current
Limit
HSB Current Ref
Sets the maximum current to be drawn during an HSB stop. Higher
n3-02 settings will shorten motor stopping times but cause
increased motor current, and therefore increased motor heating.
100 to
200
150%
A
A
-
-
n3-03
High Slip Braking Dwell
Time at Stop
HSB DwelTim@ Stp
Sets the amount of time the Drive will dwell at E1-09 (Minimum
Frequency) at the end of deceleration. If this time is set too low, the
machine inertia can cause the motor to rotate slightly after the HSB
stop is complete and the Drive output is shut off.
0.0 to
10.0
1.0sec
A
A
-
-
n3-04
High Slip Braking Overload
Time
HSB OL Time
Sets the time required for an HSB overload fault (OL7) to occur
when the Drive output frequency does not change for some reason
during an HSB stop. Normally this does not need to be adjusted.
30 to
1200
40sec
A
A
-
-
Denotes that parameter can be changed when the Drive is running.
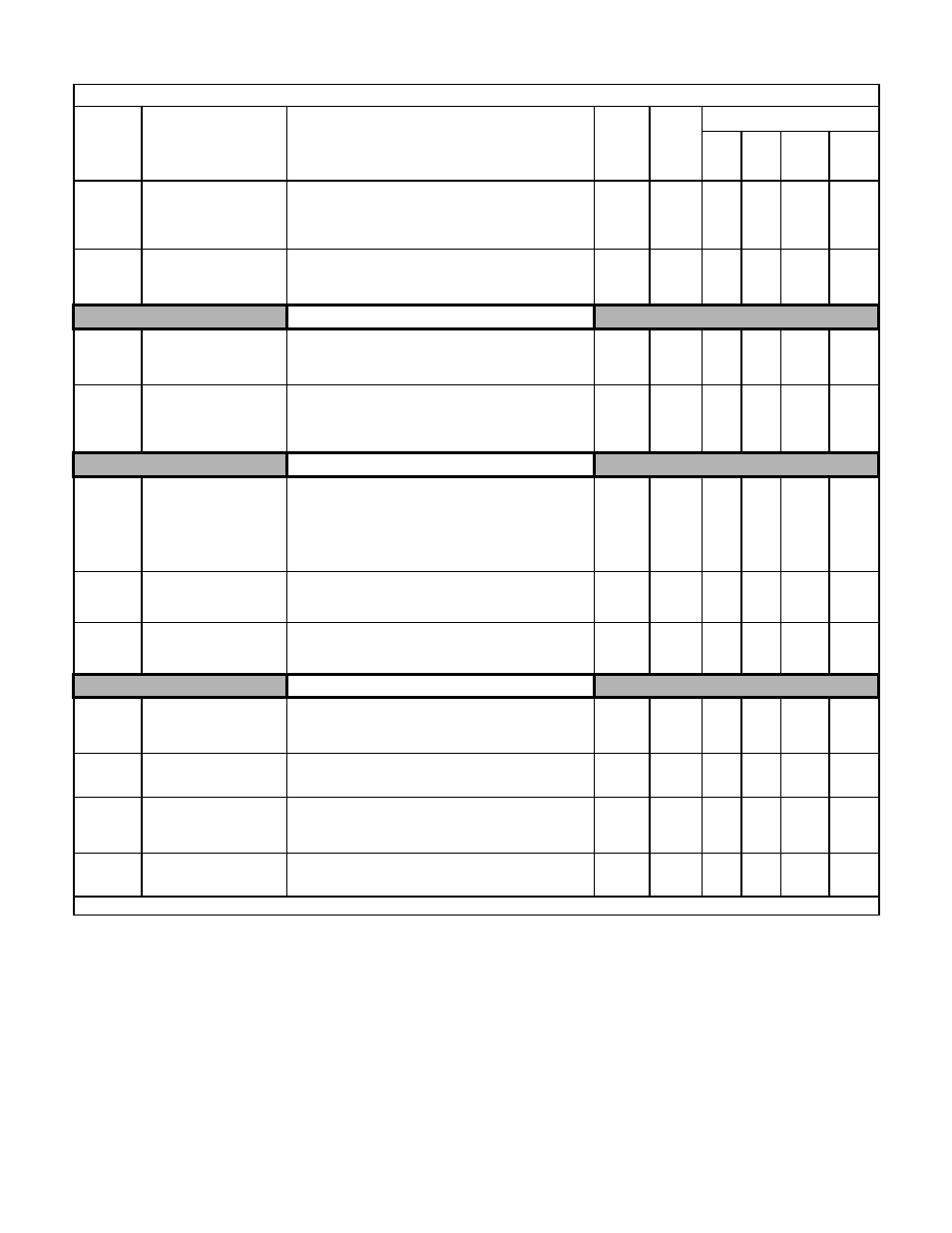
Table A.1 F7 Parameter List (Continued)
Parameter
No.
Parameter Name
Digital Operator Display
Description
Setting
Range
Factory
Setting
Control Method
V/F
V/F
w/
PG
Open
Loop
Vector
Flux
Vector