Programming 183, Torque detection, Table a.1 f7 parameter list (continued) – Yaskawa F7 Drive Programming Manual User Manual
Page 191
Programming 183
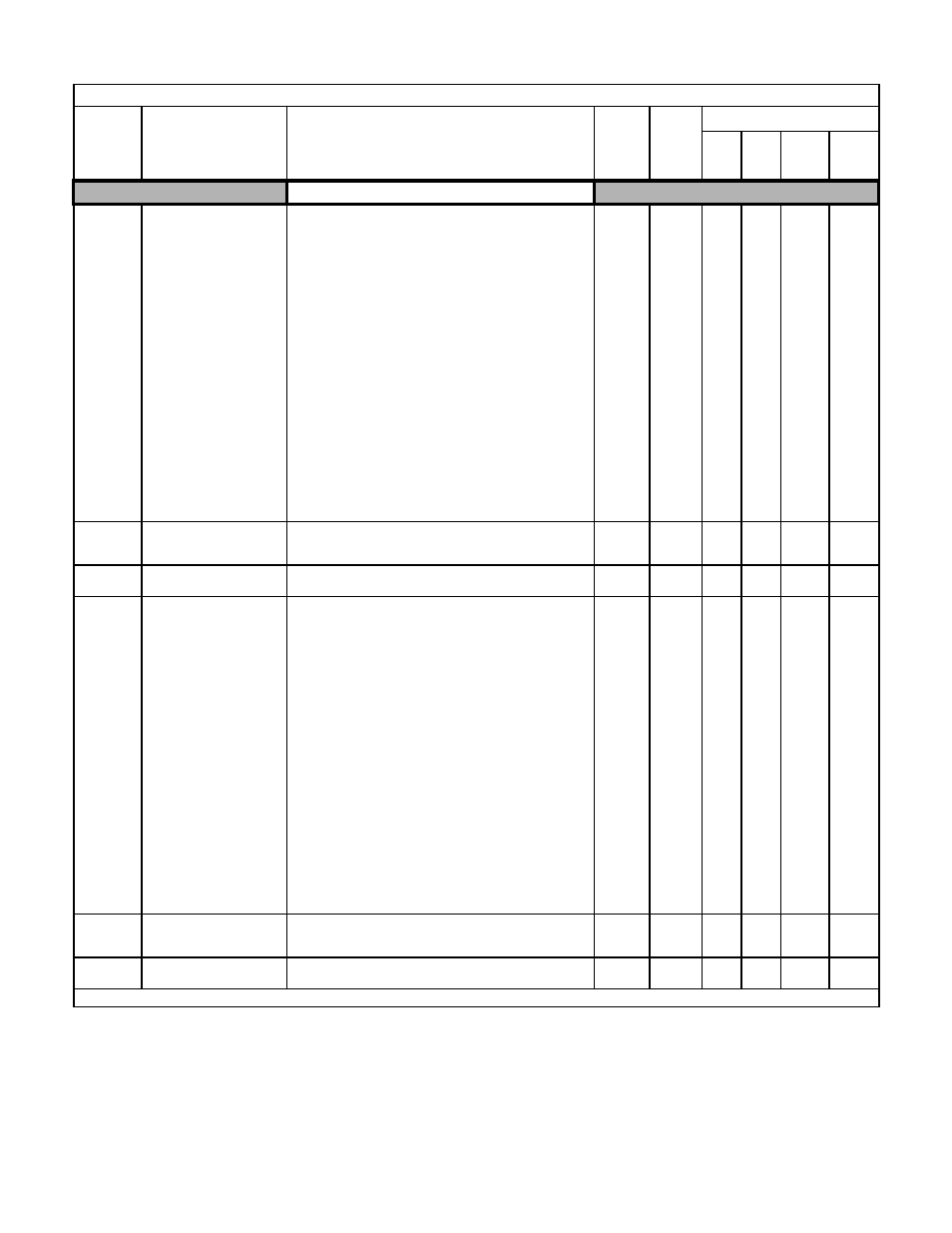
Torque Detection
L6-01
Torque Detection Selection 1
Torq Det 1 Sel
Determines the Drive's response to an Overtorque/Undertorque
condition. Overtorque and Undertorque are determined by the
settings in parameters L6-02 and L6-03. The multi-function output
settings “B” and “17” in the H2-
parameter group are also
active if programmed.
0: Disabled
1: OL3 at Speed Agree - Alarm (Overtorque Detection only active
during Speed Agree and Operation continues after detection).
2: OL3 at RUN - Alarm (Overtorque Detection is always active
and operation continues after detection).
3: OL3 at Speed Agree - Fault (Overtorque Detection only active
during Speed Agree and Drive output will shut down on an OL3
fault).
4: OL3 at RUN - Fault (Overtorque Detection is always active and
Drive output will shut down on an OL3 fault).
5: UL3 at Speed Agree - Alarm (Undertorque Detection is only
active during Speed Agree and operation continues after
detection).
6: UL3 at RUN - Alarm (Undertorque Detection is always active
and operation continues after detection).
7: UL3 at Speed Agree - Fault (Undertorque Detection only active
during Speed Agree and Drive output will shut down on an OL3
fault).
8: UL3 at RUN - Fault (Undertorque Detection is always active
and Drive output will shut down on an OL3 fault).
0 to 8
0
A
A
A
A
L6-02
Torque Detection Level 1
Torq Det 1 Lvl
Sets the Overtorque/Undertorque detection level as a percentage of
Drive rated current or torque for torque detection 1. Current
detection for A1-02 = 0 or 1. Torque detection for A1-02 = 2 or 3.
0 to 300
150%
A
A
A
A
L6-03
Torque Detection Time 1
Torq Det 1 Time
Sets the length of time an Overtorque/Undertorque condition must
exist before torque detection 1 recognized by the Drive.
0.0 to
10.0
0.1sec
A
A
A
A
L6-04
Torque Detection Selection 2
Torq Det 2 Sel
Determines the Drive's response to an Overtorque/Undertorque
condition. Overtorque and Undertorque are determined by the
settings in parameters L6-05 and L6-06. The multi-function output
settings “18” and “19” in the H2-
parameter group are also
active if programmed.
0: Disabled
1: OL4 at Speed Agree - Alarm (Overtorque Detection only active
during Speed Agree and Operation continues after detection).
2: OL4 at RUN - Alarm (Overtorque Detection is always active
and operation continues after detection).
3: OL4 at Speed Agree - Fault (Overtorque Detection only active
during Speed Agree and Drive output will shut down on an OL4
fault).
4: OL4 at RUN - Fault (Overtorque Detection is always active and
Drive output will shut down on an OL4 fault).
5: UL4 at Speed Agree - Alarm (Undertorque Detection is only
active during Speed Agree and operation continues after
detection).
6: UL4 at RUN - Alarm (Undertorque Detection is always active
and operation continues after detection).
7: UL4 at Speed Agree - Fault (Undertorque Detection only active
during Speed Agree and Drive output will shut down on an OL4
fault).
8: UL4 at RUN - Fault (Undertorque Detection is always active
and Drive output will shut down on an OL4 fault).
0 to 8
0
A
A
A
A
L6-05
Torque Detection Level 2
Torq Det 2 Lvl
Sets the Overtorque/Undertorque detection level as a percentage of
Drive rated current or torque for torque detection 2. Current
detection for A1-02 = 0 or 1. Torque detection for A1-02 = 2 or 3.
0 to 300
150%
A
A
A
A
L6-06
Torque Detection Time 2
Torq Det 2 Time
Sets the length of time an Overtorque/Undertorque condition must
exist before torque detection 2 is recognized by the Drive.
0.0 to
10.0
0.1sec
A
A
A
A
Denotes that parameter can be changed when the Drive is running.
Table A.1 F7 Parameter List (Continued)
Parameter
No.
Parameter Name
Digital Operator Display
Description
Setting
Range
Factory
Setting
Control Method
V/F
V/F
w/
PG
Open
Loop
Vector
Flux
Vector