Programming 22 – Yaskawa F7 Drive Programming Manual User Manual
Page 30
Programming 22
b5-11 PID Reverse Selection
Parameter b5-11 determines whether reverse operation is allowed while using PID control (b5-01
≠0) and the PID output goes
negative. The factory default setting will not allow the Drive to run in reverse when the PID output goes negative. Zero speed
limit is automatic when reverse prohibit is selected using b1-04. (Refer also to b5-09).
b5-12 PID Feedback Reference Missing Detection Selection
b5-13 PID Feedback Loss Detection Level
Setting Range:
0 to 100%
Factory Default: 0%
b5-14 PID Feedback Loss Detection Time
Setting Range:
0.0 to 25.0 Seconds
Factory Default: 1.0 Seconds
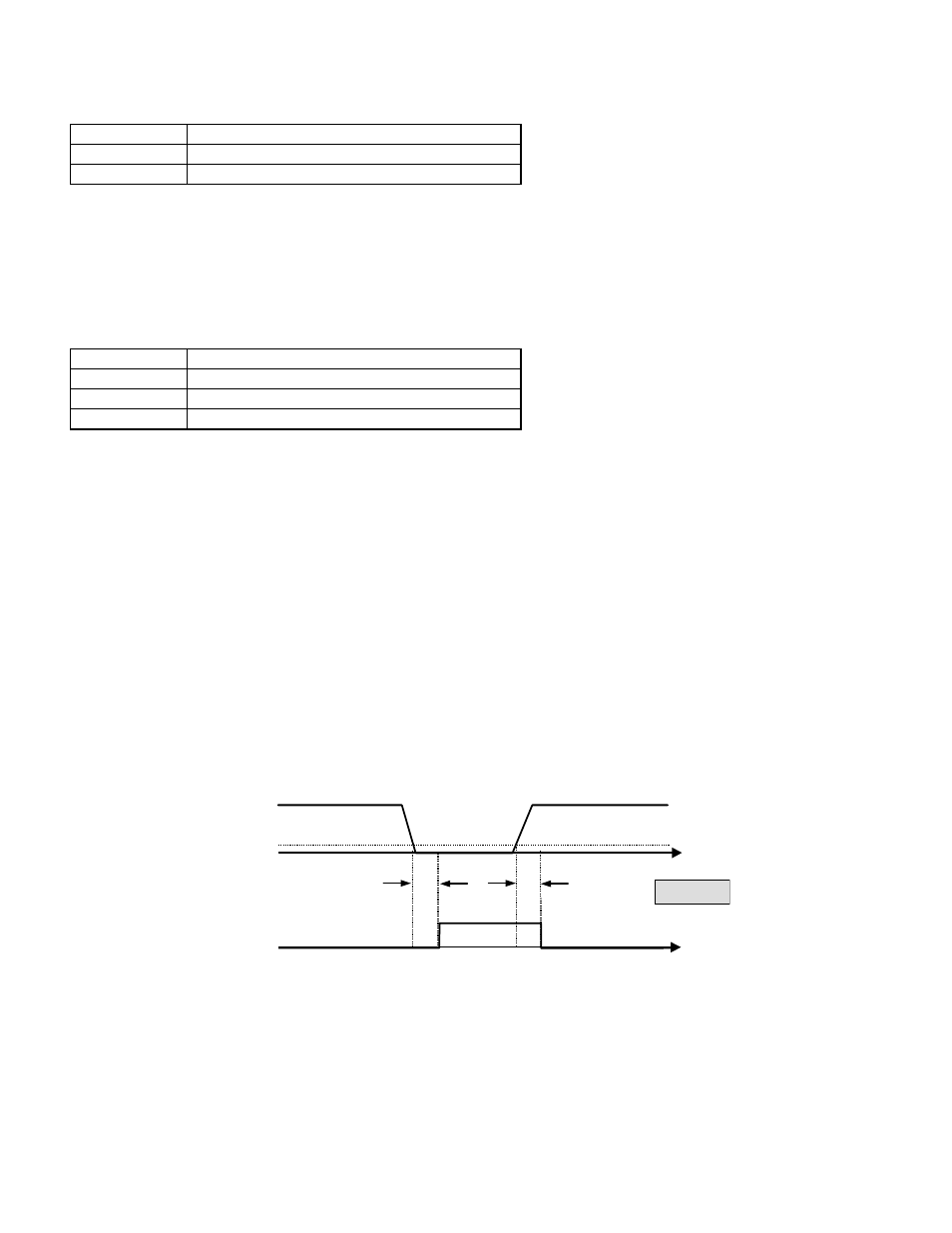
Loss of feedback can cause problems to a PID application. The Drive can be programmed to turn on a digital output whenever
a loss of feedback occurs. Feedback Loss Detection is turned on by b5-12. When b5-12= “1: Alarm”, the Drive acknowledges
the loss of feedback without stopping or turning on the fault output (MA-MB). If b5-12= “2: Fault”, the Drive coasts to a stop
and turns on the fault output if the feedback is determined to be lost. The Drive interprets feedback loss whenever the feedback
signal drops below the value of b5-13 and stays below that level for at least the time set into b5-14. See Figure below for timing
details.
Fig. 18 Loss of PID Feedback Feature
b5-15 Sleep Function Start Level
Setting Range:
0.0 to 200.0 Hz
Factory Default: 0.0 Hz
Setting
Description
0
0 Limit (factory default)
1
Reverse
Setting
Description
0
Disabled (factory default)
1
Alarm
3
Fault
Measured
Feedback
T
t
Feedback
Loss Output
T
b5-13
T = b5-14
Feedback
Loss Digital Output
ON (CLOSED)
OFF (OPEN)
TIME