10 interpolation deceleration time change (idc), 1) overview – Yaskawa MP2000 Series: User's Manual for Motion Programming User Manual
Page 150
8.1 Axis Setting Commands
8-43
8
Command Reference
8.1.10 Interpolation Deceleration Time Change (IDC)
(1) Overview
The Interpolation Deceleration Time Change command (IDC) changes the deceleration time for the following
axis move commands.
• Linear Interpolation command (MVS)
• Circular Interpolation command (MCW, MCC)
• Helical Interpolation command (MCW, MCC)
• SKP command (Linear interpolation with skip function) (SKP)
In this manual, the above axis move commands are referred to as interpolation related commands.
The Maximum Interpolation Feed Speed Setting command (FMX) must be executed before executing the IDC
command. The deceleration time changed by the IDC command remains until it is reset by the next IDC com-
mand.
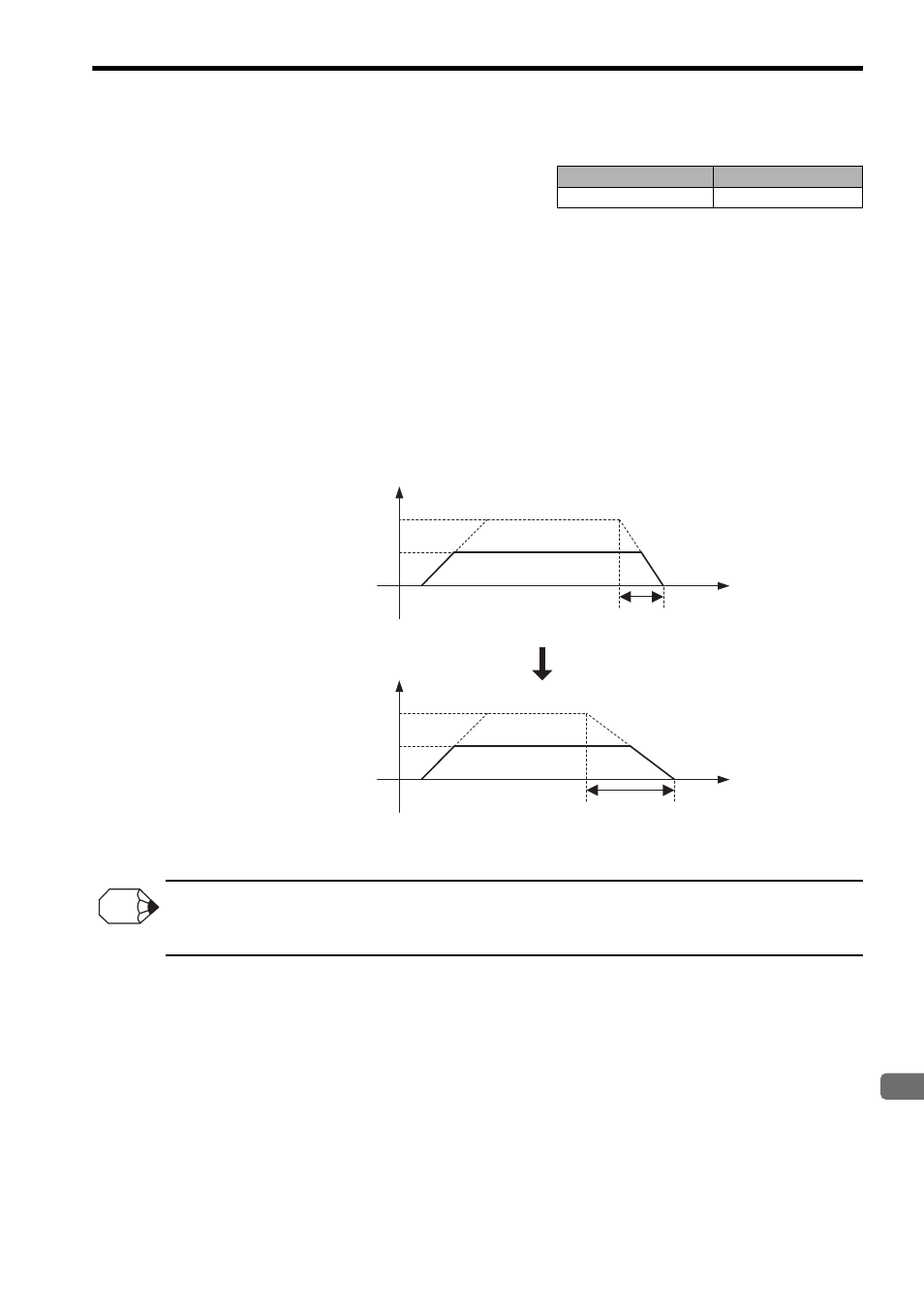
The interpolation deceleration time is 0 ms when the program starts running.
Fig. 8.22 Interpolation Deceleration Time Change Command (IDC)
The Interpolation Deceleration Time Change command (IDC) sets the deceleration time for interpolation related com-
mands MVS, MCW, MCC, and SKP.
Use the DCC command to set the deceleration time for positioning related commands MOV, EXM, and MVT.
Motion Programs
Sequence Programs
Applicable
Not applicable
Speed (V)
Time (t)
Before interpolation deceleration time change
Speed (V)
Time (t)
After interpolation deceleration time change
Feed speed for
interpolation
Max. feed speed
for interpolation
Feed speed for
interpolation
Max. feed speed
for interpolation
IDC
IDC
INFO