3) programming examples – Yaskawa MP2000 Series: User's Manual for Motion Programming User Manual
Page 182
8.2 Axis Move Commands
8-75
8
Command Reference
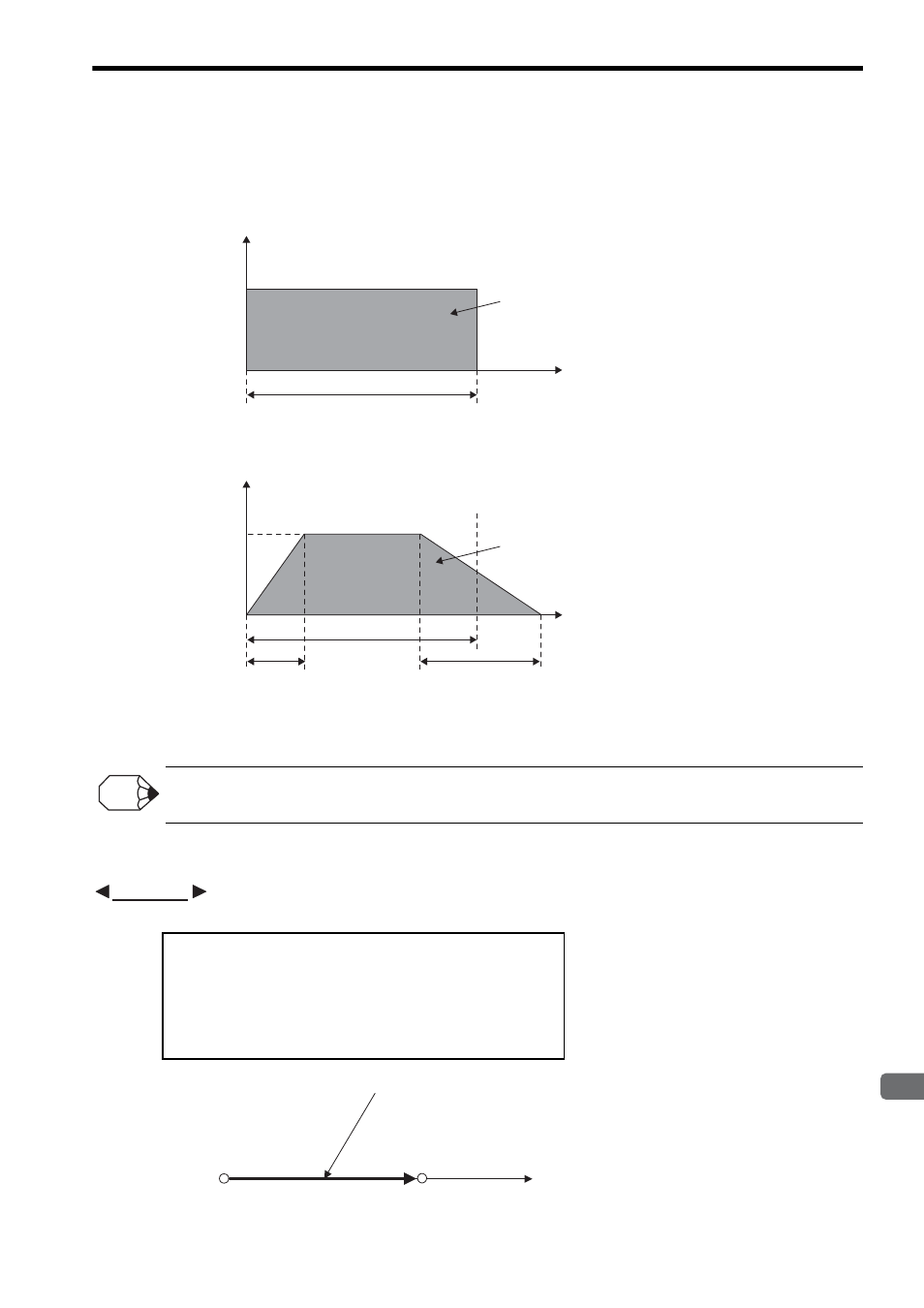
The positioning time reference range is between 1 and 2147483647 (ms).
Inside the MP2000 Machine Controller, the feed speed during MVT command execution is calculated according
to the specified positioning time and moving amount.
This calculation does not include acceleration (acceleration = 0) as shown below.
The actual operation when the acceleration time T1 is less than the deceleration time T2 will be as shown below.
The feed speed set by VEL command will be changed accordingly. After executing the MVT command, reset the
feed speed by using VEL command.
An in-position check is executed for axis movement by MVT command execution, as well as for MOV command execu-
tion, to verify that the axis enters the positioning completed range.
(3) Programming Examples
A programming example of an MVT command in ABS mode is shown below.
Fig. 8.44 MVT Command Programming Example
Positioning time T
Moving amount L
(Travel distance)
Calculated
feed speed V
Speed (V)
Time (t)
Positioning time T
Acceleration time T1
Deceleration time T2
Moving amount L
(Travel distance)
Calculated
feed speed V
Speed (V)
Time (t)
INFO
ABS;
ACC [A1]1000;
DCC [A1]1000;
MVT [A1]4000 T1000;
END;
EXAMPLE
A1
End position
Program
current
position
4000
Positioning in
one second