2) format, 3) setting items for mcw and mcc commands – Yaskawa MP2000 Series: User's Manual for Motion Programming User Manual
Page 173
8 Command Reference
8.2.5 Clockwise/Counterclockwise Helical Interpolation with Center Position Designation (MCW, MCC)
8-66
(2) Format
(3) Setting Items for MCW and MCC Commands
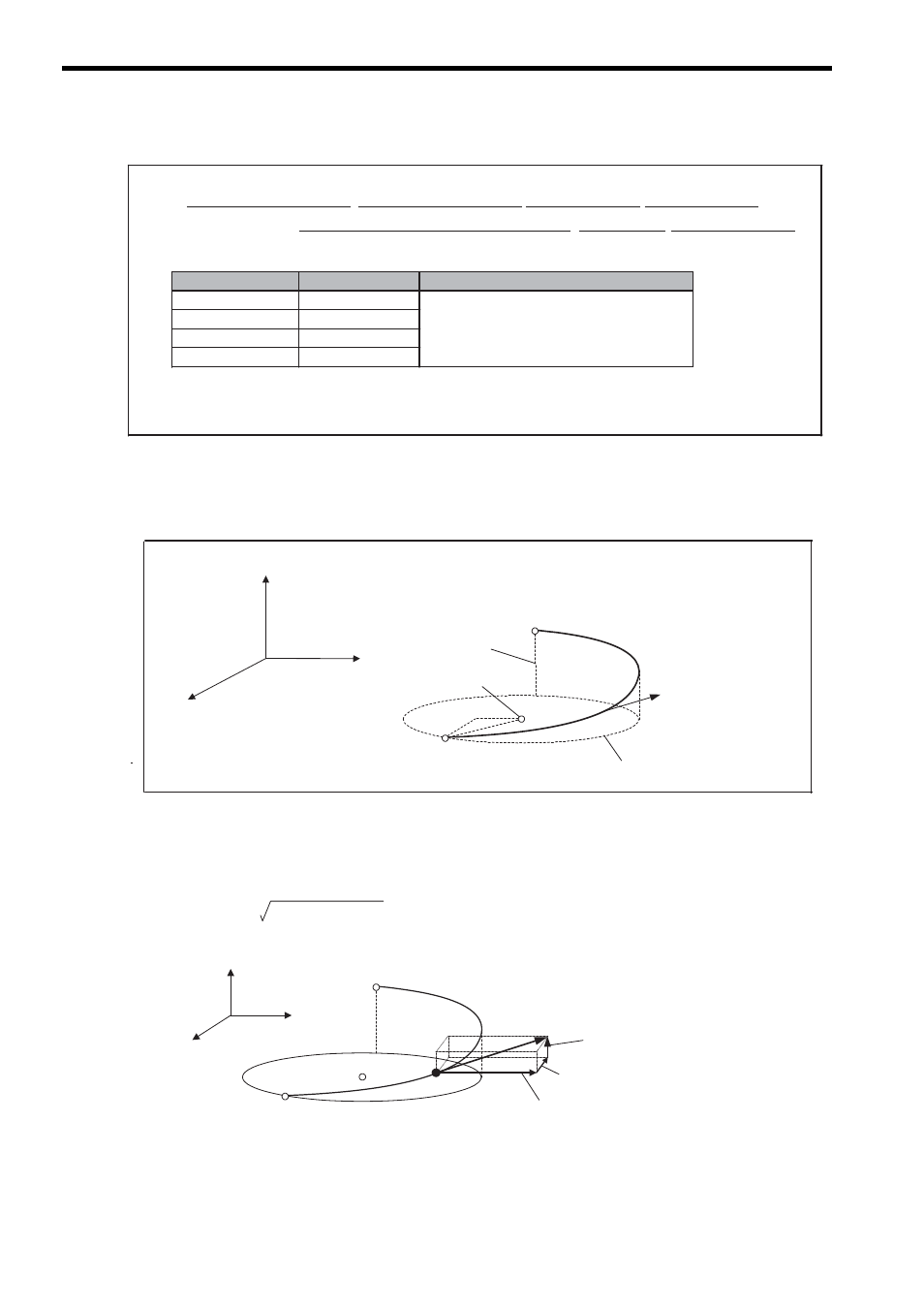
Motion Image
a) Interpolation feed speed
For the helical interpolation commands (MCW and MCC), the interpolation feed speed is calculated with the
tangential speed for circular interpolation and the composite speed for the linear interpolation axis.
Item
Unit
Usable Data
End position
Reference unit
Number of turns
Interpolation feed speed Reference unit/min
Directly designated value
Double integer type register (Indirect designation)
Note: The number of turns and interpolation feed speed can be omitted.
MCW [Logical axis name 1] End position [Logical axis name 2] End position U Center point position V Center point position
[Logical axis name 3] End position for linear interpolation T Number of turns F Interporation feed speed ;
Center point position
Reference unit
Number of times of turn
Logical axis 3
Logical axis 1
Logical axis 2
End position
(Same as for circular interpolation)
Center position
(Same as for circular
interpolation)
Linear interpolation
portion
Circular interpolation portion
Program
current position
a) Interpolation
feed speed
(Tangential speed)
MCC command block: MCC [X]- [Y]- U- V- [Z]- F300;
F = 300 = Vx + Vy + Vz (reference units/min)
2
2
Vx (reference units//min)
Vy (reference units/min)
Interpolation feed speed
(Composite speed of three axes)
Vz (reference units/min)
2
Z
X
Y