7 application examples, 1 example 1: handling system, 2 example 2: mechanical parts inserting machine – Yaskawa MP2000 Series: User's Manual for Motion Programming User Manual
Page 28
1 Overview
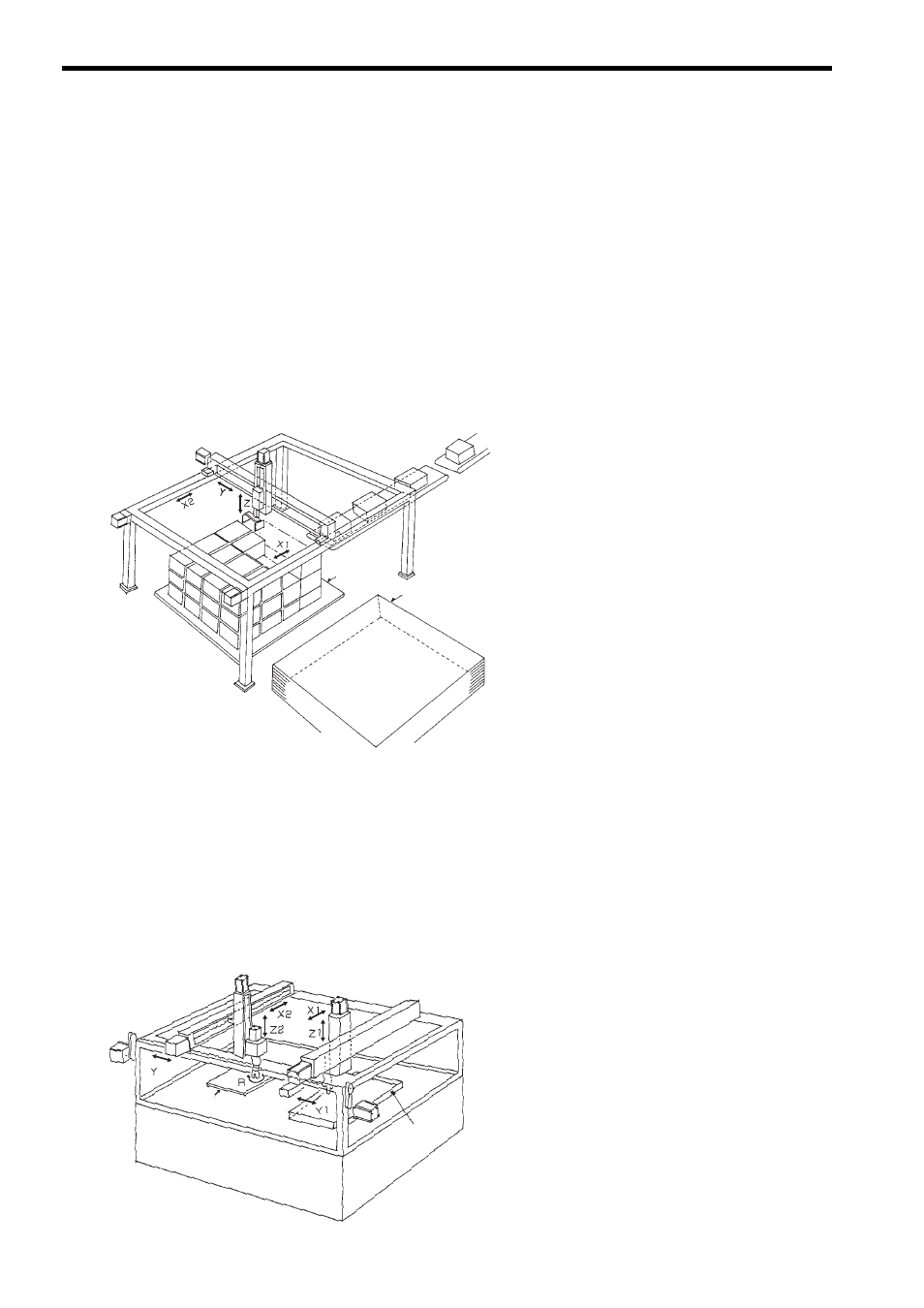
1.7.1 Example 1: Handling System
1-12
1.7 Application Examples
Motion programs can be used for operations of various systems.
Some application examples are shown below.
1.7.1 Example 1: Handling System
1.7.2 Example 2: Mechanical Parts Inserting Machine
Outline
• To stack a specified number of cardboard boxes on a pallet
and transport them to the next process
• The system operation includes three axes motion control for
the palletizing process and an automatic pallet feeding
sequence.
Control points
• Moves X1 and X2 axes in synchronization using
a virtual axis.
• Realizes smooth movements by using interpola-
tion.
• Palletizes by calculating the position data with the
motion program according to predefined condi-
tions (box dimensions, the number of boxes in a
horizontal row, the number of boxes in a vertical
row, and the number of boxes in a stack.
Pallet
Pallet
Outline
• To insert parts, such as connectors, in a printed board.
• The handling robot takes out the parts and brings them to the
stand. The inserting robot inserts the parts in the specified posi-
tion and angle on the board.
Control points
• Two groups of axes are organized, and programs
are created for each group, so that each robot is
independently controlled.
• The tact time can be shortened by using two-axes
or three-axes linear interpolation.
+
+
-
+
-
+
-
+
-
+
-
-
2
Printed
board
Stand
Parts tray
Robot 2
Robot 1