2 program development procedure, 1 hardware configuration, 2 installing mpe720 version 6 – Yaskawa MP2000 Series: User's Manual for Motion Programming User Manual
Page 41: 3 communication settings, 4 system setup, Program development flow, Personal computer running mpe720 servopack, Servopack
3.2 Program Development Procedure
3-3
3
Program Development Flow
3.2 Program Development Procedure
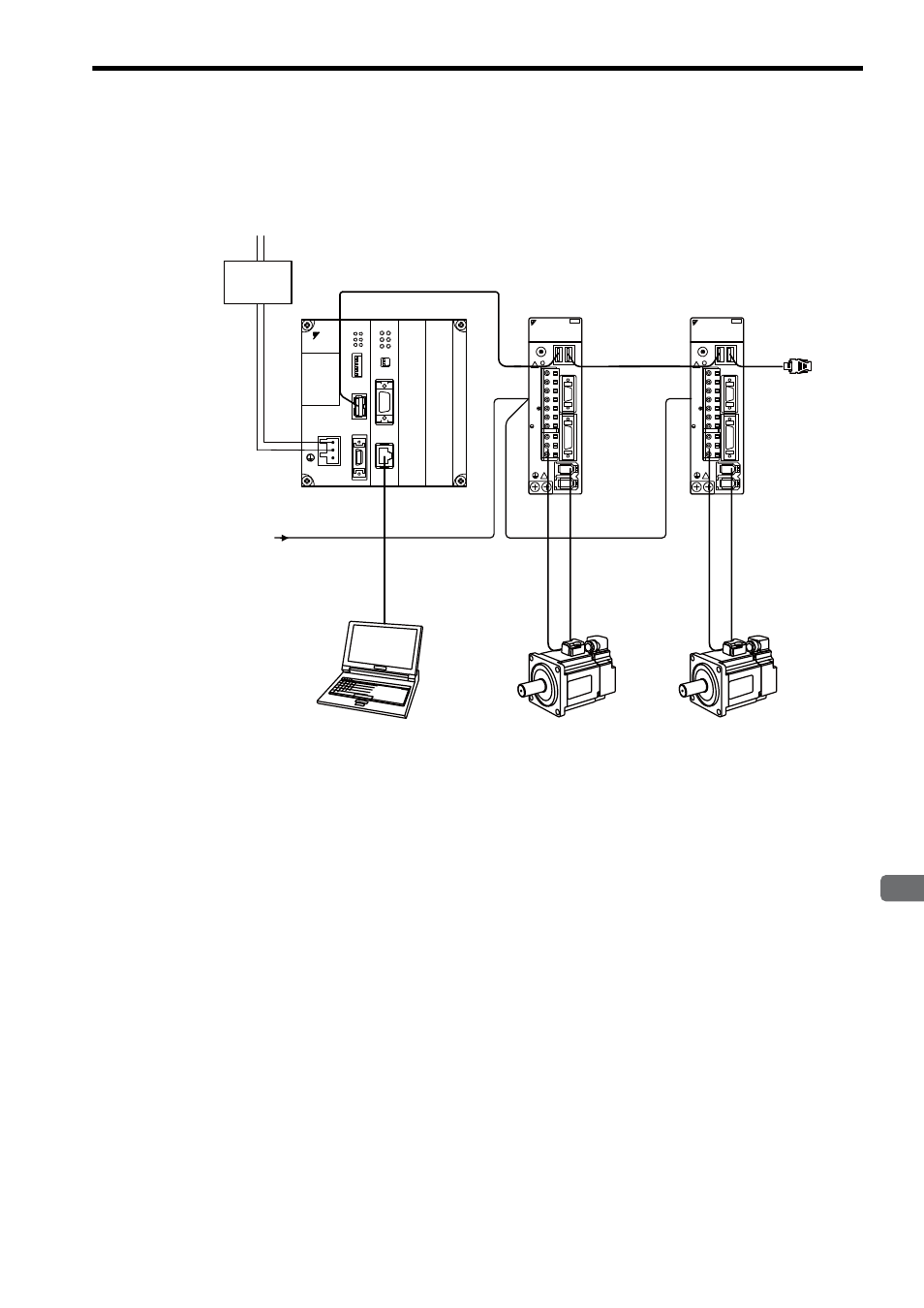
3.2.1 Hardware Configuration
The program development procedure is explained using the following system configuration.
Note: In the system configuration above, set the station numbers of the two SERVOPACKs to 1 and 2.
3.2.2 Installing MPE720 Version 6
Install MPE720 Ver.6 in a personal computer.
For information on the installation procedure, refer to Engineering Tool for MP2000 Series Machine Controller
MPE720 Version 6 User’s Manual (manual no.: SIEPC88070030).
3.2.3 Communication Settings
Set the conditions for communications between the computer on which MPE720 Ver.6 is installed and the
MP2000-series Machine Controller.
For information on the communication settings, refer to Engineering Tool for MP2000 Series Machine Control-
ler MPE720 Version 6 User’s Manual (manual no.: SIEPC88070030).
3.2.4 System Setup
Use the self-configuration function to setup the system. The self-configuration function automatically recognizes
the modules installed on the MP2000-series Machine Controller and the devices connected to the Machine Con-
troller through the MECHATROLINK connection. This function allows you to quickly and easily set up the sys-
tem. The self-configuration can be executed either when the power to the Machine Controller turns ON or by
using MPE720.
For information on how to execute self-configuration, refer to the user’s manual for the Machine Controller to be
used.
Personal computer running MPE720
SERVOPACK
YASKAWA SERVOPACK
200V
SGDS-01A12A
SW1
CHARGE
C
N
3
A/B
C
N
1
C
N
2
C
N
4
L1
L2
L2C
L1C
B1/
B2
U
V
W
C
N
6
SERVOPACK
YASKAWA SERVOPACK
200V
SGDS-01A12A
SW1
CHARGE
C
N
3
A/B
C
N
1
C
N
2
C
N
4
L1
L2
L2C
L1C
B1/
B2
U
V
W
C
N
6
MECHATROLINK cable
Servomotor
Servomotor
Power
supply
Power supply
Terminator
DC24V
DC 0V
MP2300
YASKAWA
TEST
RDY
ALM
TX
RUN
ERR
BAT
MON
CNFG
INT
SUP
STOP
SW1
OFF ON
BATTERY
CPU I/O
M-I/II
218IF-01
ERR
COL
RX
RUN
STRX
TX
INIT
TEST
ON
OFF
PORT
10Base-T
Machine Controller
Motor cable
Encoder cable
MECHATROLINK
cable
PP cable