Yaskawa AC Drive P1000 Bypass Technical Manual User Manual
Page 122
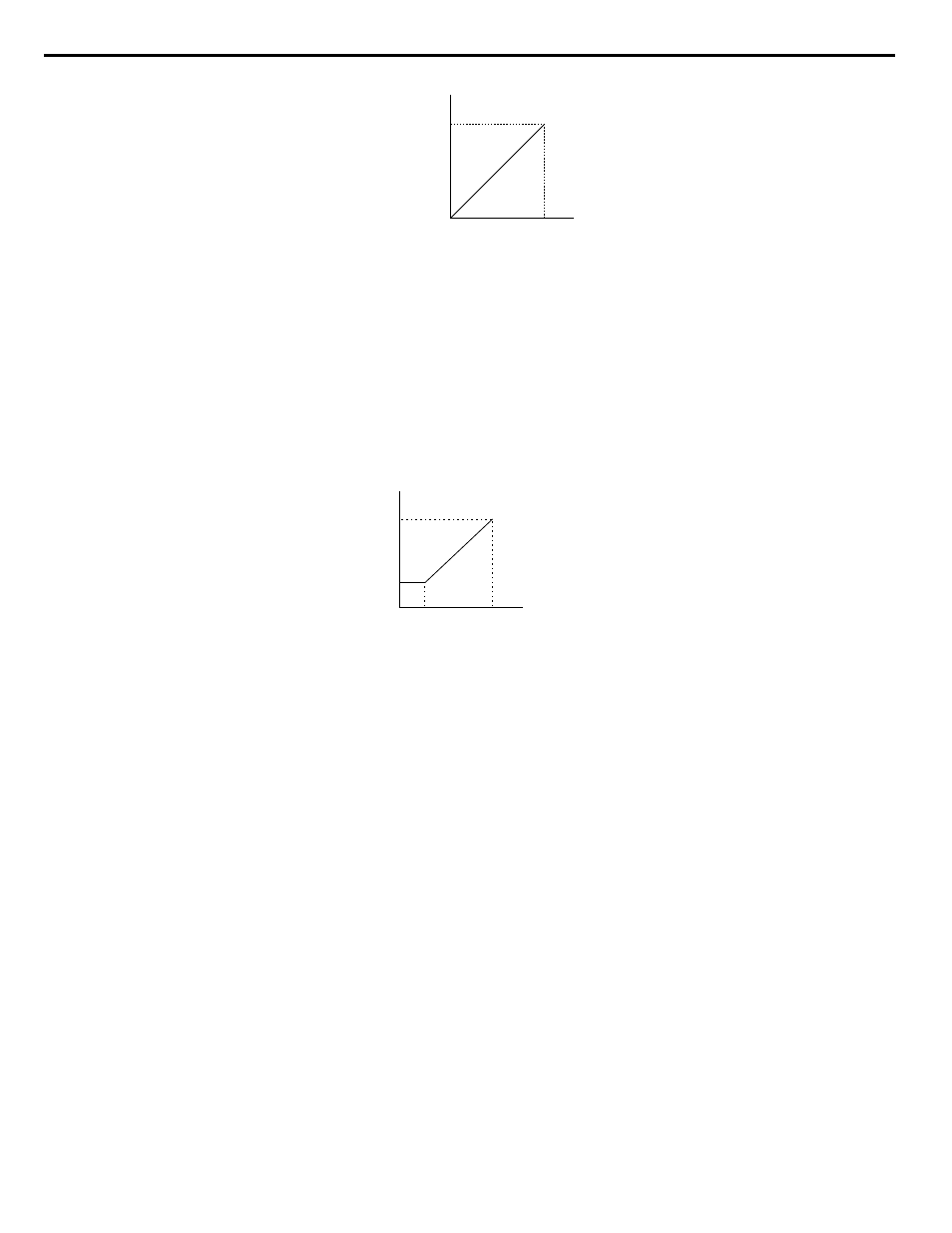
Drive Rated
Current
0
(4)
100%
10 V
(20 mA)
DC Injection Braking Current Level
Figure 5.26 DC Injection Braking Current Using an Analog Input Terminal
Setting 7: Torque Detection Level
Using this setting, the overtorque/undertorque detection level for torque detection 1 (L6-01) can be set by an analog input.
The analog input replaces the level set to L6-02. An analog input of 100% (10 V or 20 mA) sets a torque detection level equal
to 100% drive rated current/motor rated torque. Adjust the analog input gain if higher detection level settings are required.
Refer to L6: Torque Detection on page 134
for details on torque detection.
Setting 8: Stall Prevention Level
Allows an analog input signal to adjust the Stall Prevention level.
shows the setting characteristics. The drive will
use the lower value of the Stall Prevention level set to L3-06 or the level coming from the selected analog input terminal.
Stall Prevention Level during Run
30%
100%
Analog Input Level
30%
100%
0
Figure 5.27 Stall Prevention During Run Using an Analog Input Terminal
Setting 9: Output Frequency Lower Limit Level
The user can adjust the lower limit of the output frequency using an analog input signal.
Setting B: PID Feedback
Supplies the PID feedback value. This setting requires PID operation to be enabled in b5-01.
Setting C: PID Setpoint
Supplies the PID setpoint value and makes the frequency reference selected in parameter b1-01 no longer the PID setpoint.
PID operation to be enabled in b5-01 to use this setting.
Refer to PID Setpoint Input Methods on page 91
Setting D: Frequency Bias
The input value of an analog input set to this function will be added to the frequency reference. This function can be used with
any frequency reference source.
Setting E: Motor Temperature
In addition to motor overload fault detection oL1, it is possible to use a PTC (Positive Temperature Coefficient) thermistor
for motor insulation protection.
Setting F: Not used
When set to F, an input does not affect any drive function, but the input level can still be read out by a PLC via a BACnet
communication or MEMOBUS/Modbus communications.
Setting 16: Differential PID Feedback
If an analog value is set for this function, the PID controller is set for differential feedback. The difference of the PID feedback
input value and the differential feedback input value builds the feedback value used to calculate the PID input.
Feedback Input Methods on page 92
5.7 H: Terminal Functions
122
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual