Yaskawa AC Drive P1000 Bypass Technical Manual User Manual
Page 88
<1> The wait time for Speed Search (b3-05) determines the lower limit.
Notes on Using Speed Estimation Speed Search
• Perform Rotational Auto-Tuning for V/f Control (T1-01 = 3) prior to using Speed Estimation in V/f Control and perform
Stationary Auto-Tuning for Line-to-Line Resistance (T1-01 = 2) again if the there is a change in the cable length between
the drive and motor.
• Use Current Detection to search for speeds beyond 200 Hz if the application is running multiple motors from the same drive
or if the motor is considerably smaller than the capacity of the drive.
• Speed Estimation may have trouble finding the actual speed if the motor cable is very long. Use Current Detection in these
instances.
• Use Current Detection instead of Speed Estimation when operating motors smaller than 1.5 kW because Speed Estimation
might not be able to detect the speed or rotation of these smaller motors, in which case Speed Estimation would stop the
motor.
n
Speed Search Activation
Speed Search can be activated using any of the methods 1 through 5 described below. The Speed Search type must be selected
in parameter b3-24 independent of the activation method.
Method 1. Automatically activate Speed Search with every Run command. External Speed Search commands are ignored.
Method 2. Activate Speed Search using the digital input terminals.
Use the input functions for H1-oo in
.
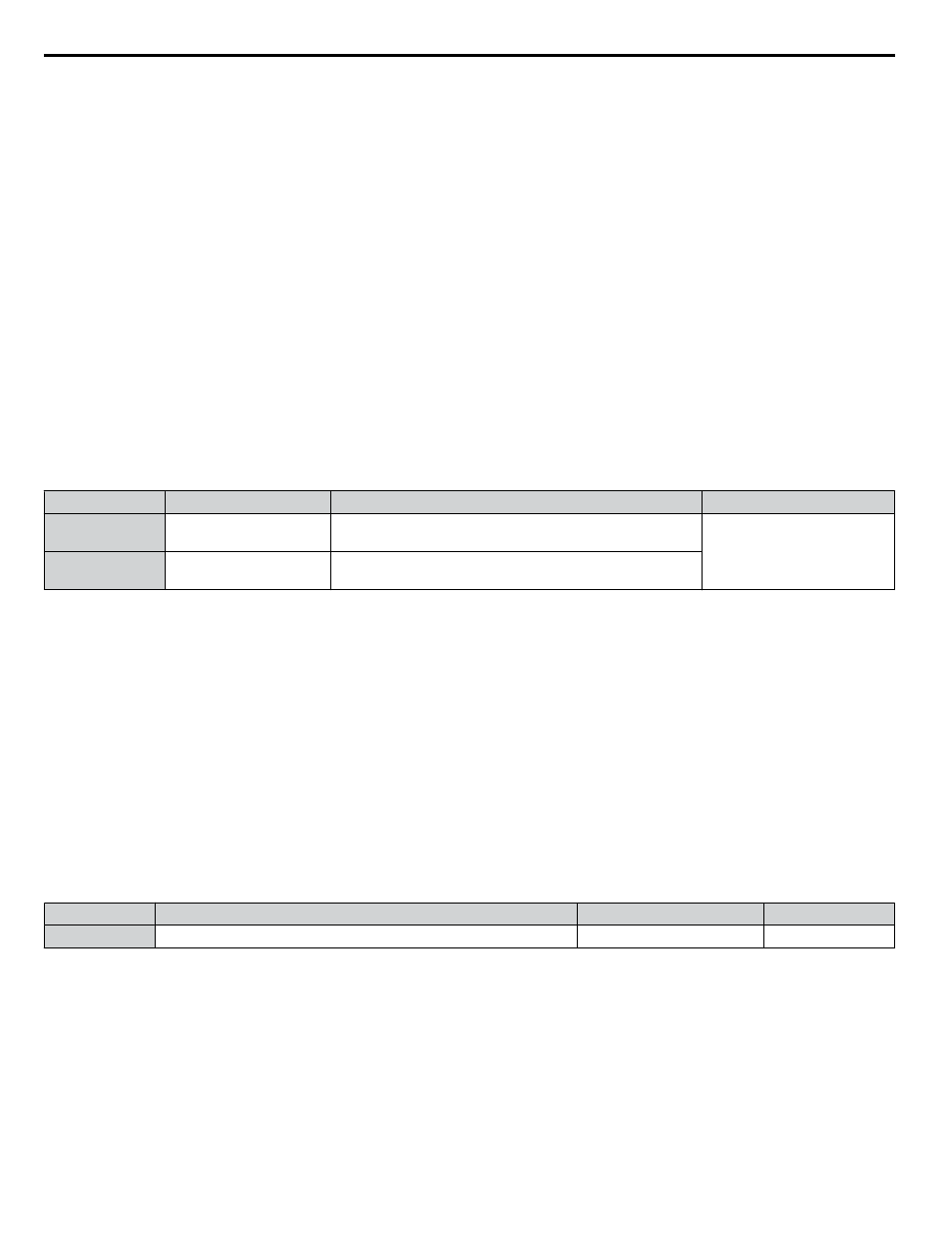
Table 5.1 Speed Search Activation by Digital Inputs
Setting
Description
b3-24 = 0
b3-24 = 1
61
External Search
Command 1
Closed: Activate Current Detection Speed Search from the
maximum output frequency (E1-04).
Activate Speed Estimation
Speed Search
62
External Search
Command 2
Closed: Activate Current Detection Speed Search from the
frequency reference.
To activate Speed Search by a digital input, the input must be set together with the Run command or the Run command must
be entered after giving the Speed Search command.
Method 3. After automatic fault restart.
When the number of maximum fault restarts in parameter L5-01 is set higher than 0, the drive will automatically perform
Speed Search as specified by b3-24 following a fault.
Method 4. After momentary power loss.
This mode requires that the Power Loss Ride-Thru function is enabled during CPU operation (L2-01 = 1 or 2).
Momentary Power Loss Operation Selection on page 127
Method 5. After external baseblock is released.
The drive will resume the operation starting with Speed Search if the Run command is present and the output frequency is
above the minimum frequency when the Baseblock command (H1-oo = 8 or 9) is released.
n
b3-01: Speed Search Selection at Start
Determines if Speed Search is automatically performed when a Run command is issued.
No.
Parameter Name
Setting Range
Default
b3-01
Speed Search Selection at Start
0, 1
0
Setting 0: Disabled
This setting starts operating the drive at the minimum output frequency when the Run command is entered. If external Speed
Search 1 or 2 is already enabled by a digital input, the drive will start operating with Speed Search.
Setting 1: Enabled
This setting performs Speed Search when the Run command is entered. The drive begins running the motor once Speed Search
is complete.
n
b3-02: Speed Search Deactivation Current
Sets the operating current for Speed Search as a percentage of the drive rated current. Normally there is no need to change
this setting. Lower this value if the drive has trouble restarting.
5.2 b: Application
88
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual