A-42 – Yaskawa MP2300S Basic Module User Manual
Page 364
Appendix E Motion Parameter Details
E.2 Setting Parameter List
A-42
* Valid only when using an MP2300SCPU ver 2.61 or later and
Σ-V series servo drive.
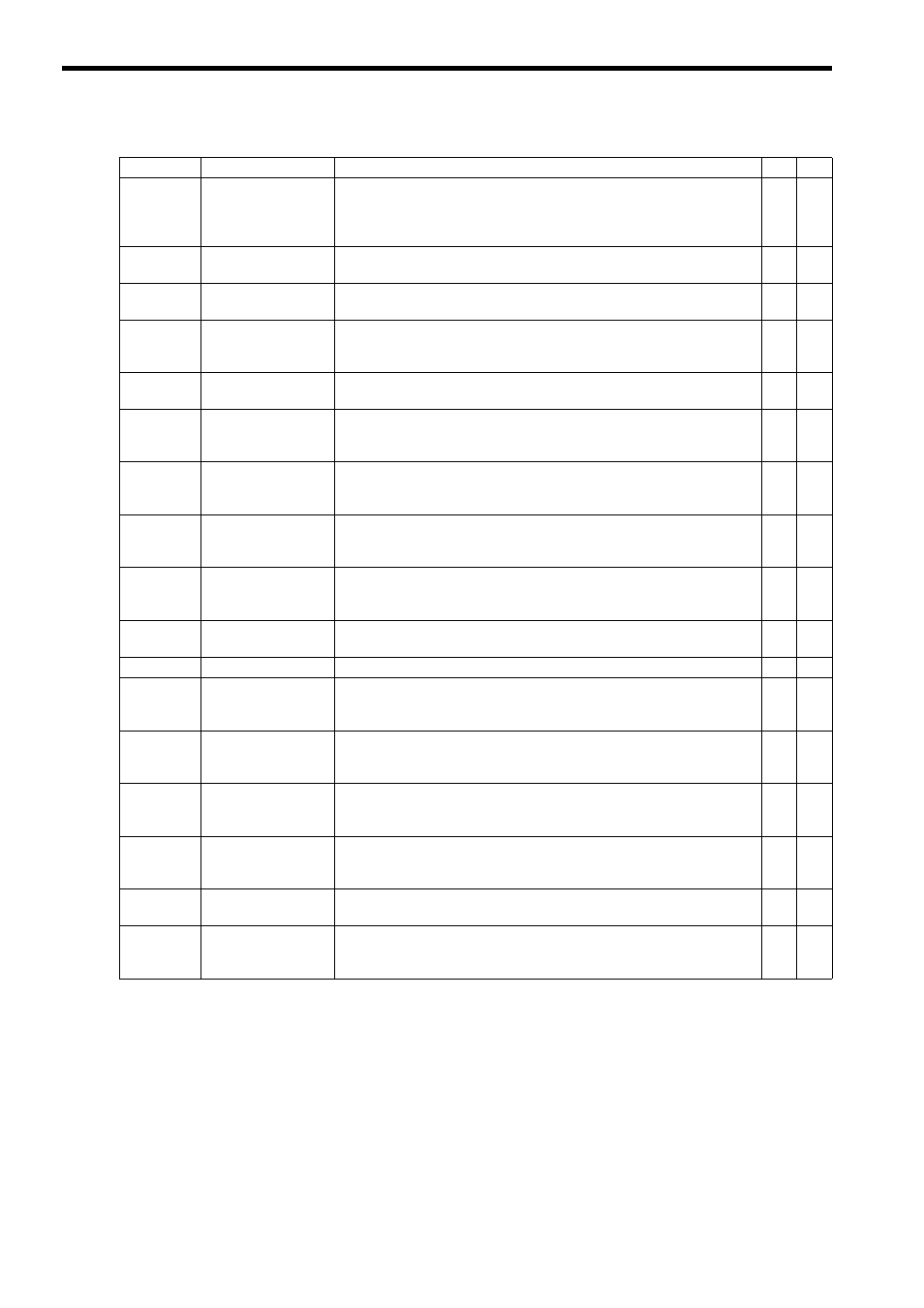
OW4E
Servo User Monitor
Setting
Bits 0 to 3: Monitor 1 (Setting impossible)
Bits 4 to 7: Monitor 2
Bits 8 to B: Monitor 3 (Setting impossible)
Bits C to F: Monitor 4
Yes
OW4F
Servo Driver Alarm
Monitor No.
Set the number of the alarm to monitor.
Yes
OW50
Servo Driver User
Constant No.
Set the number of the SERVOPACK parameter.
Yes
OW51
Servo Driver User
Constant Number
Size
Set the number of words in the SERVOPACK parameter.
Yes
OL52
Servo Driver User
Constant Set Point
Set the setting for the SERVOPACK parameter.
Yes
OW54
Servo Driver for
Assistance User
Constant No.
Set the number of the SERVOPACK parameter number.
Yes
OW55
Servo Driver for
Assistance User
Constant Size
Set the number of words in the SERVOPACK parameter.
Yes
OL56
Servo Driver for
Assistance User
Constant Set Point
Set the setting for the SERVOPACK parameter.
Yes
OW58
to
OW5B
−
Reserved
−
−
OW5C
Fixed Parameter
Number
Set the number of the fixed parameter to read with the FIXPRM_RD motion
subcommand.
Yes
Yes
OW5D
−
Reserved
−
−
OL5E
Encoder Position
When Power is OFF
(Lower 2 Words)
1 = 1 pulse
• Do not set in the linear type.
Yes
OL60
Encoder Position
When Power is OFF
(Upper 2 Words)
1 = 1 pulse
• Do not set in the linear type.
Yes
OL62
Pulse Position When
Power is OFF
(Lower 2 Words)
1 = 1 pulse
• Do not set in the linear type.
Yes
OL64
Pulse Position When
Power is OFF
(Upper 2 Words)
1 = 1 pulse
• Do not set in the linear type.
Yes
OL66 to
OL6E
−
Reserved
−
−
OW70
to
OW7F
Command Buffer for
Transparent
Command Mode
This area is used for command data when MECHATROLINK servo com-
mands are specified directly.
Yes
(cont’d)
Register No.
Name
Contents
SVB SVR