A-46 – Yaskawa MP2300S Basic Module User Manual
Page 368
Appendix E Motion Parameter Details
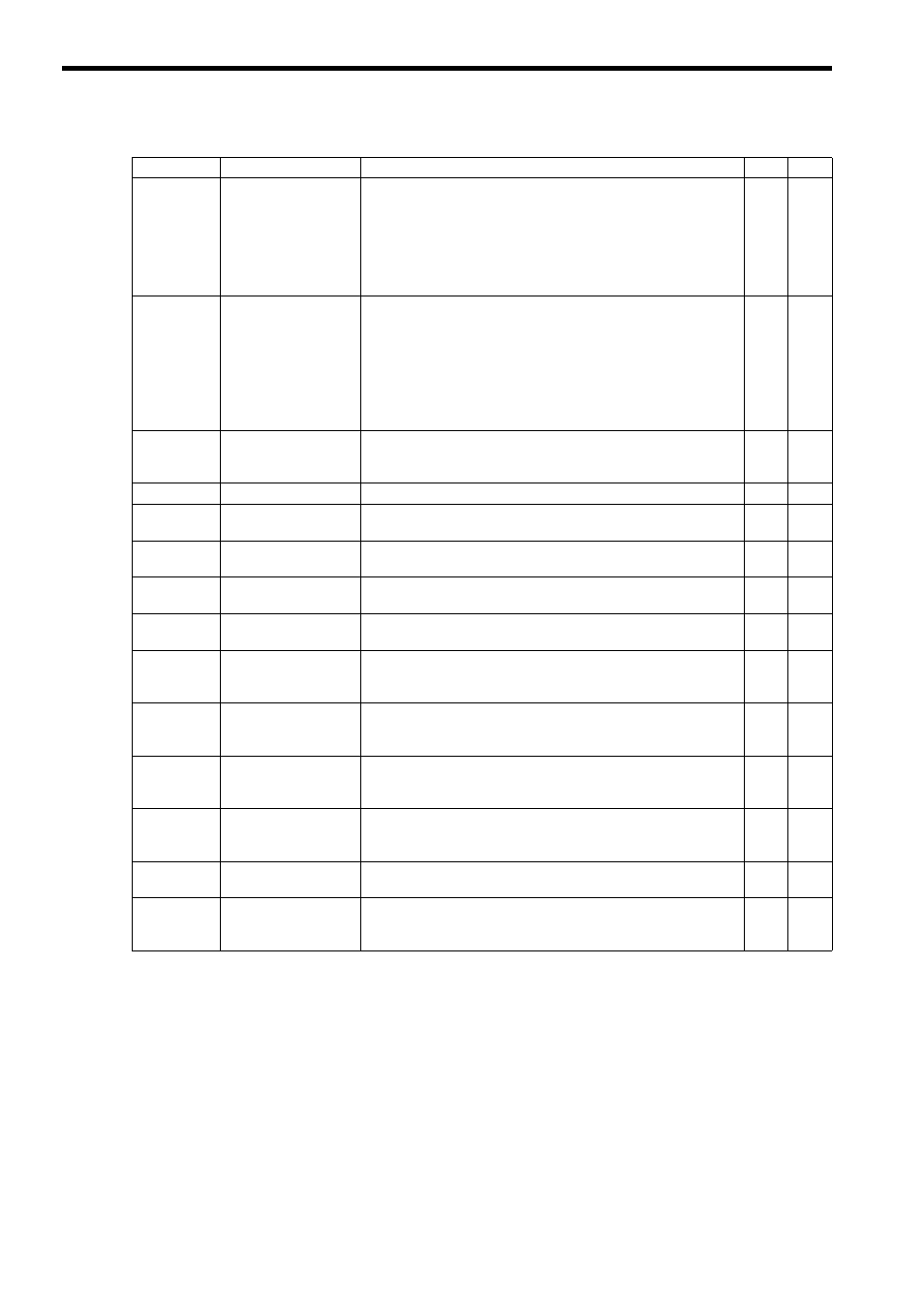
E.3 Monitoring Parameter List
A-46
* Valid only when using an MP2300SCPU ver 2.61 or later and
Σ-V series servo drive.
IL38
Servo Driver User
Constant Reading
Data (SERVOPACK
Parameter Reading
Data for
MECHATROLINK
Command Area)
Stores the data of the parameter being read.
Yes
IL3A
Supplementary Servo
Driver User Constant
Reading Data
(SERVOPACK
Parameter Reading
Data for
MECHATROLINK
Subcommand Area)
Stores the data of the parameter being read.
Yes
IW3F
Motor Type
Stores the type of motor actually connected.
0: Rotation type motor
1: Linear motor
Yes
IL40
Feedback Speed
Unit is according to OW03, bits 0 to 3 (Speed Unit).
Yes
Yes
IL42
Feedback
torque/thrust
Unit is according to OW03, bits 12 to 15 (Torque Unit).
Yes
Yes
IW44 to
IW55
−
Reserved
−
−
IL56
Fixed Parameter
Monitor
Stores the data of the fixed parameter when FIXPRM-RD has been
specified in the Motion Subcommand.
Yes
Yes
IW58 to
IW5C
−
Reserved
−
−
IL5E
Encoder Position
When the Power is
OFF (Lower 2 Words)
1 = 1 pulse
Yes
IL60
Encoder Position
When the Power is
OFF (Upper 2 Words)
1 = 1 pulse
Yes
IL62
Pulse Position When
the Power is OFF
(Lower 2 Words)
1 = 1 pulse
Yes
IL64
Pulse Position when
the Power is OFF
(Upper 2 Words)
1 = 1 pulse
Yes
IW66 to
IW6F
−
Reserved
−
−
IW70 to
IW7F
Response Buffer for
Transparent
Command Mode
Stores the response data when MECHATROLINK Servo commands
are specified directly.
Yes
(cont’d)
Register No.
Name
Contents
SVB
SVR