A-98, 6 ) function code (param04), 7 ) data address (param05) – Yaskawa MP2300S Basic Module User Manual
Page 420: 8 ) data size (param06), 9 ) remote cpu number (param07)
Appendix G MSG-SND/MSG-RCV Functions (Ethernet)
G.2 Message Receive Function (MSG-RCV)
A-98
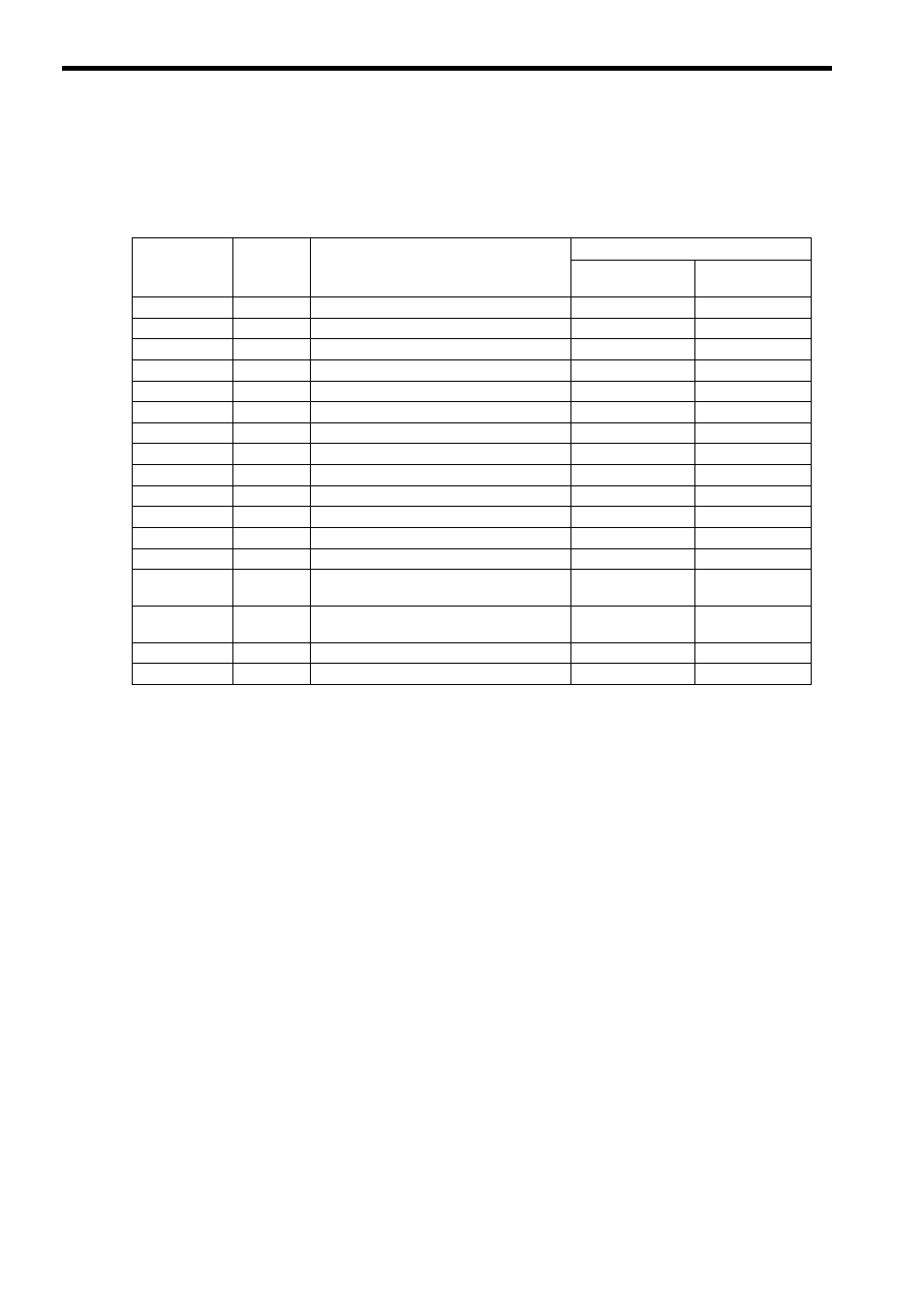
( 6 ) Function Code (PARAM04)
Received function code is output.
The following table lists function codes available when using MEMOBUS or Extended MEMOBUS as a protocol.
Note: 1. B: Bit type, W: Integer type
2.
√: Available, –: Not available
3. Transmit and receive registers in the master operation mode are MW (MB) only.
4. In the slave operation mode, coil, holding register, input relay, and input register are MB, MW, IB, IW
respectively.
( 7 ) Data Address (PARAM05)
A data address requested from the transmission side is output.
( 8 ) Data Size (PARAM06)
The read/write data size (number of bits or words) requested from the transmission side is output.
( 9 ) Remote CPU Number (PARAM07)
When the remote equipment is MP2000 series, “1” is output.
When the remote equipment is a controller manufactured by YASKAWA Electric Corporation other than MP2000
series and is comprised of multiple CPU modules, the remote CPU number is output.
Otherwise, “0” is output.
Table G.20 Function Code List (MEMOBUS, Extended MEMOBUS)
Function Code
Target
Data Type
Function
Protocol
Extended
MEMOBUS
MEMOBUS
00H
–
Unused
–
–
01H
B
Reads coil state
√
√
02H
B
Reads input relay state
√
√
03H
W
Reads holding register content
√
√
04H
W
Reads input register content
√
√
05H
B
Changes single coil state
√
√
06H
W
Writes to single holding register
√
√
07H
–
Unused
–
–
08H
–
Loopback test
√
√
09H
W
Reads holding register content (extended)
√
–
0AH
W
Reads input register content (extended)
√
–
0BH
W
Writes to holding register (extended)
√
–
0CH
–
Unused
–
–
0DH
W
Discontinuously reads holding register
(extended)
√
–
0EH
W
Discontinuously writes to holding register
(extended)
√
–
0FH
B
Changes multiple coil states
√
√
10H
W
Writes to multiple holding registers
√
√