Main motion management ladder logic program, System startup – Yaskawa MP930 User Manual
Page 168
System Startup
4.3.9 Ladder Logic Programs
4 -66
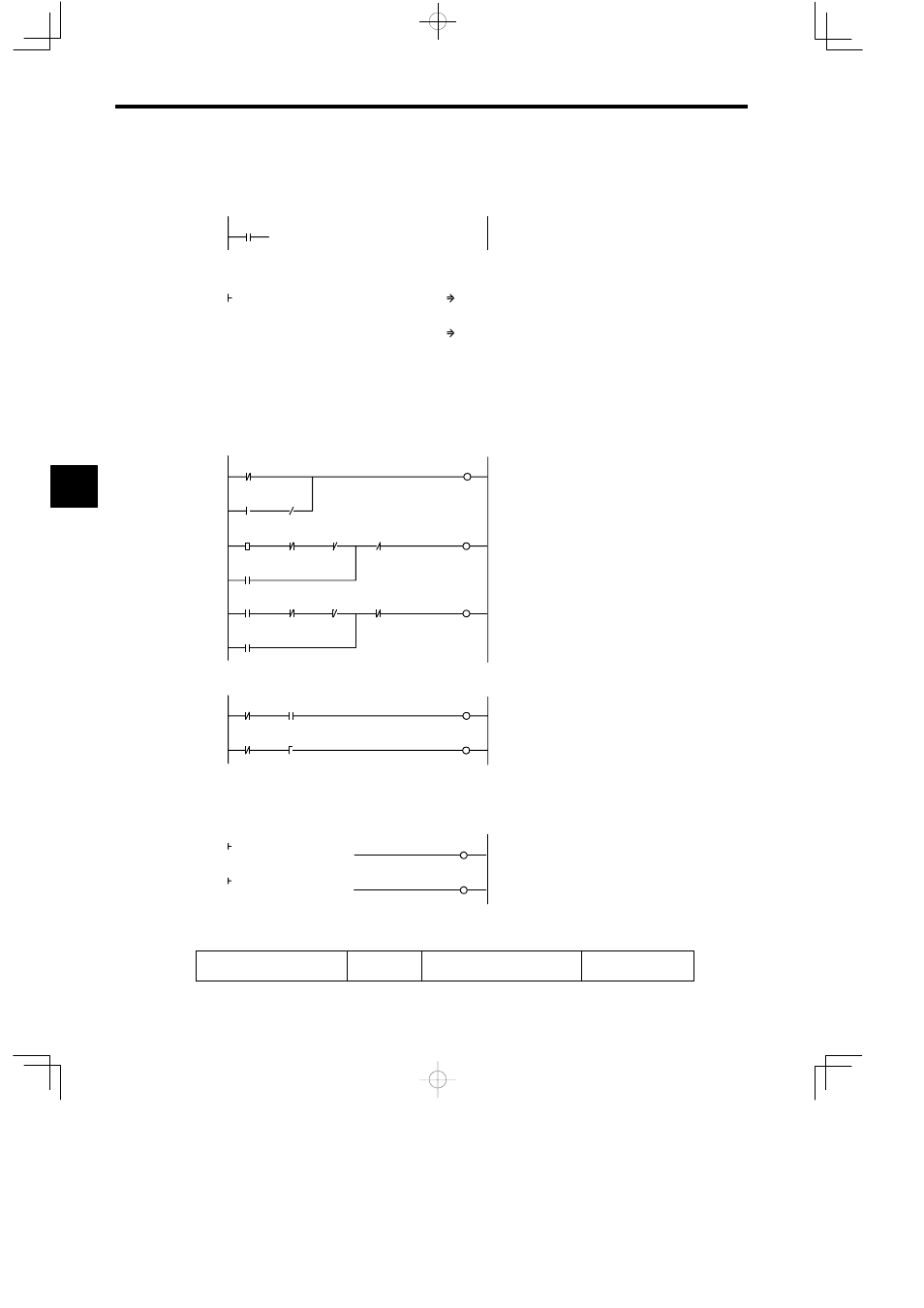
Main Motion Management Ladder Logic Program
Emergency
stop
Stopped for
emergency
Stopped for
emergency
Alarm
reset
J
Emergency stop
J
Servo ON
J
Alarm
Automatic
mode
Manual
mode
Manual mode
status
Automatic mode status
OFF request
Automatic mode
status
Manual
mode
Automatic
mode
Automatic mode
status
Manual mode status
OFF request
Manual mode
status
Stopped for
emergency
(SVRUNCMD)
Stopped for
emergency
Axis servo ON (axis 2)
Axis 2
Servo parameter
(ALARM)
Servo parameter
(SVRUNCMD)
Axis alarm generated
Servo parameter
(ALARM)
IB00005
DB001020
IB00006
DB001020
SB000001
IB00000
IB00001
DB00100A
DB001023
DB001009
DB001009
IB00001
IB00000
DB001009
DB001024
DB00100A
DB00100A
DB001020
IB00100
DB001020
IB00110
OBC0010
OBC0410
DB001040
DB001050
IFON
00000
SETW
DW00100
D=00000
W=00006
IEND
ILC022
≠00000
ILC062
≠00000
DW00000
DW00001
P00103
PSH9200−962401
DWG. H01
1 0000
1 0001
$FSCAN−H
2 0002
2 0004
2 0005
1 0008
1 0009
1 0010
1 0013
1 0016
1 0019
1 0022
1 0025” ST−AXSCHG01”
1 0026
1 0029
1 0032” ED−AXSCHG01”
1 0033” ST−AXSCHG02”
1 0034
1 0040” ED−AXSCHG02”
1 0037
Draw.
Date 1997.12.17
DWG. H01
Main program
PSH9200−962401 P00103
COMMENT,CROSS REF.($,&,@=WRITE,/=DWG,−=ABOX,|=SFC,==SYMBOL,%=FBD,:=TBL)
Main program
First high-speed scan
J
Work memory initialization
Task 1 program status
Task 1 program control signal
Automatic mode
status
Manual mode
status
J
Mode selection
Axis servo ON (axis 1)
Servo parameter
Axis 1
Axis alarm generated
4