Yaskawa MP930 User Manual
Page 218
5.2 Parameter Settings
5 -33
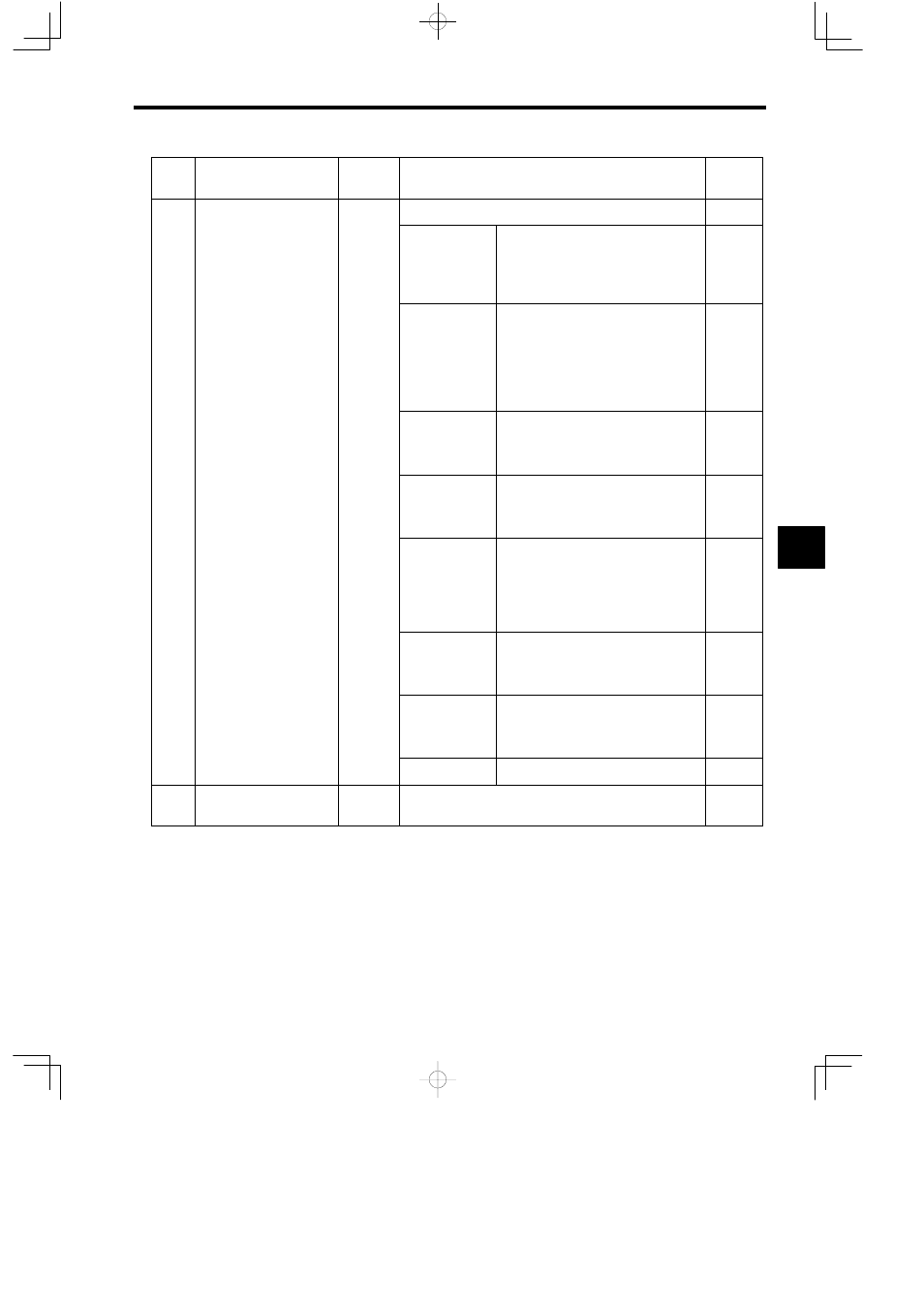
No.
Remarks
Description
Register
No.
Name
15
Motion command status
IWxx15
These flags indicate the executing status of motion commands.
−
b0: BUSY
Command executing
S
Indicates that a motion command is be-
ing executed and that a new motion
command cannot be issued.
−
b1: HOLDL
Command hold completed
S
Turns ON when a request has been is-
sued to put a motion command on hold
in setting parameter OWxx21 b0: Hold
command and the hold has been com-
pleted.
−
b2: DEN
Distribution complete
S
Stores distribution completed (DEN) sta-
tus for the MECHATROLINK servo.
−
b3: ZSET
Zero point setting complete
S
Turns ON when the ZSET motion com-
mand has finished executing.
−
b4: EX_LATCH
External positioning signal latch complete
S
Turns ON when latching by an external
signal is completed when the EX_POJ-
ING/LATCH motion command is
executed.
−
b5: FAIL
Command error end status
S
Turns ON when an error occurs in mo-
tion command processing.
−
b6: ZRNC
Zero point return complete status
S
Turns ON when zero point return has
been completed.
−
b7 to b15
Not used.
−
16
Number of digits left of radix
point
IWxx16
Monitors fixed parameter 18: Number of digits left of radix point. −
5