Yaskawa MP930 User Manual
Page 210
5.2 Parameter Settings
5 -25
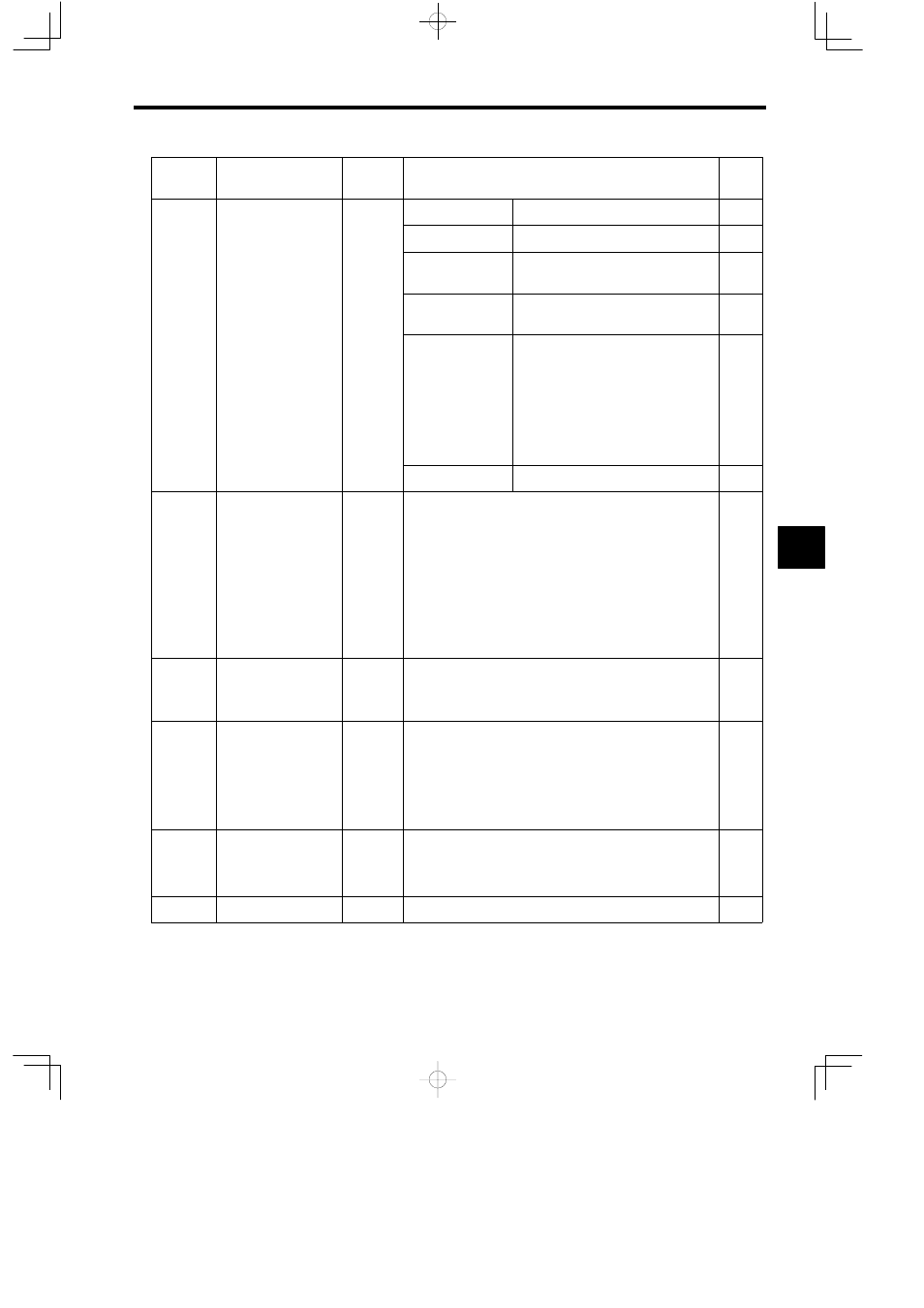
Parameter
No.
Default
Description
Register
No.
Name
29
Motion command control
flags
OWxx21
b0: HOLD
Hold the command
0
flags
b1: ABORT
Abort the command
b2: DIRECTION
Direction of movement
(0: Forward, 1: Reverse)
b3: P_PI
P and PI speed loop control switching (0:
PI)
b4 to b7: FILTER-
TYPE
Filter type selection
0: No filter
1: Exponential filter
2: Average move filter
Note: Execute CHG-FILTER command
(OWxx20 = 13) after having
changed the filter type.
b8 to b15:
Not used.
30
Rapid traverse speed
OLxx22
This speed parameter is used for move commands like JOG/STEP,
MVE, and MVT.
Setting unit: 1 = 10
n
reference units/min (n: Fixed parameter: No. of
digits left of radix point)
1 = 10
3
reference units/min when electronic gear is disabled
S
Setting range: 0 to 2
31
− 1
Related Parameters
S
Fixed parameter 18: No. of digits left of radix point
S
Setting parameter OWxx2C: Override
0
31
External positioning dis-
tance traveled
OLxx24
Sets the amount of movement after an external positioning com-
mand signal is input.
S
Setting range: −2
31
to 2
31
− 1 (1 = 1 reference unit)
0
32
Stopping distance
OLxx26
This is the distance used to decelerate to a stop to provide a software
limit function when an interpolation-related command is executed.
Since the parameter is set automatically when an interpolation-re-
lated command is executed, users do not need to set this parameter
directly.
S
Setting range: −2
31
to 2
31
− 1 (1 = 1 reference unit)
0
33
STEP distance traveled
OLxx28
Sets the amount of movement for the STEP command.
S
Setting range: 0 to 2
31
− 1
S
Unit: Reference unit
1000
34
−
−
Not used.
−
5