Yaskawa MP930 User Manual
Page 209
Parameters
5.2.2 Setting Parameters
5 -24
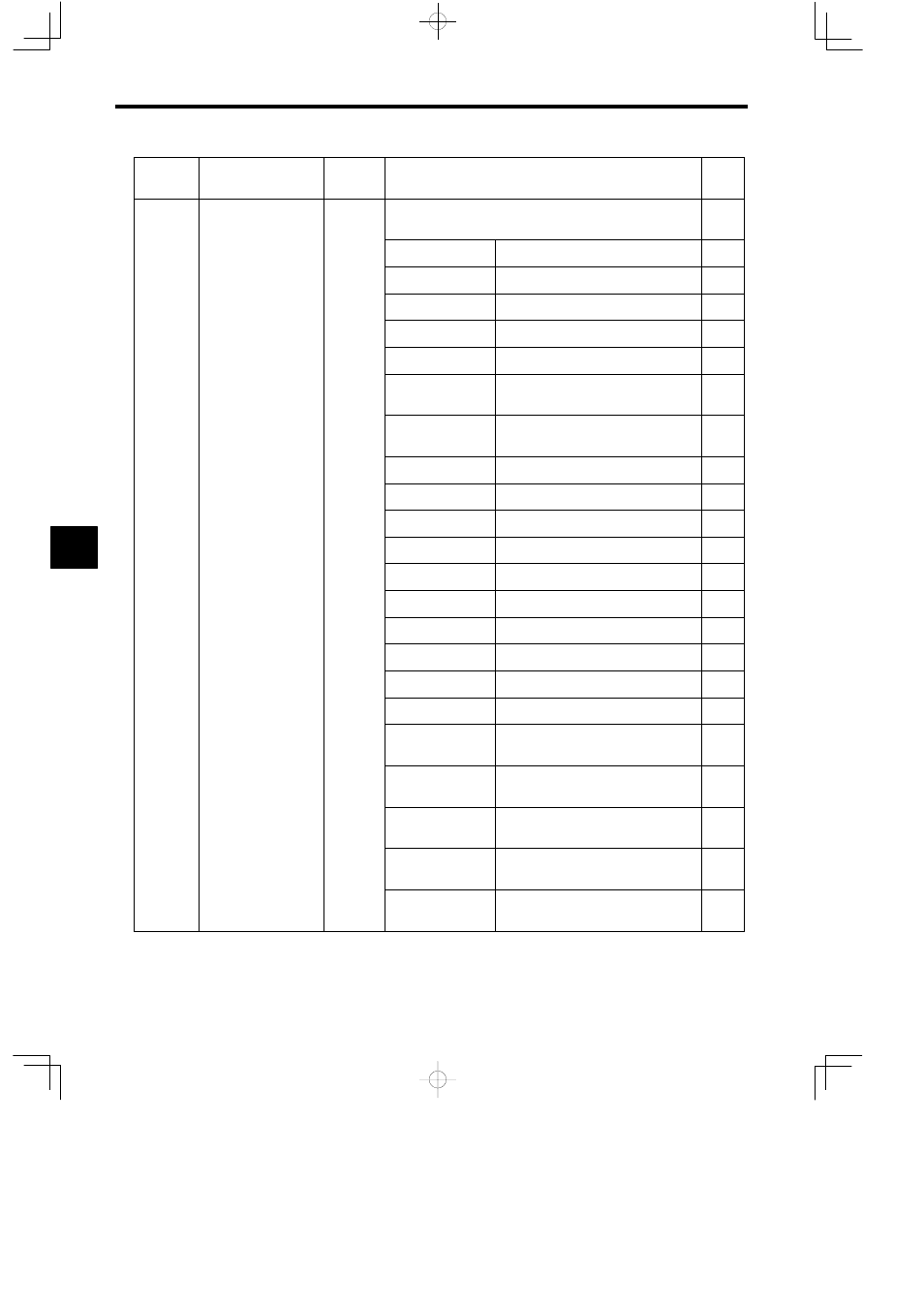
Parameter
No.
Default
Description
Register
No.
Name
28
Motion command code
OWxx20
Set the following command numbers for this parameter to send
commands to the MECHATROLINK servo.
0
0: NOP
No command
1: POSING
Positioning
2: EX_POSING
External positioning
3: ZRET
Zero point return
4: INTERPOLATE
Interpolation
5: ENDOF_
INTERPOLATE
Interpolation end segment
6: LATCH
Interpolation with position detection func-
tions
7: FEED
Fixed speed feed
8: STEP
Fixed length feed
9: ZSET
Zero point setting
10: ACC
Change the acceleration time
11
−
12: SCC
Change the filter time constant
13: CHG_FILTER
Change the filter type
14: KVS
Change the speed loop gain (kv)
15: KPS
Change the position loop gain (kp)
16: KFS
Change the feed forward (kf)
17: CN_RD
Read the MECHATROLINK servo user
constant
18: CN_WR
Write the MECHATROLINK servo user
constant
19: ALM_MON
Monitor the MECHATROLINK servo
alarms
20: ALMHIST_MON Monitor the MECHATROLINK servo
alarm history
21: ALMHIST_CLR
Clear the MECHATROLINK servo alarm
history
5