Yaskawa MP930 User Manual
Page 222
5.2 Parameter Settings
5 -37
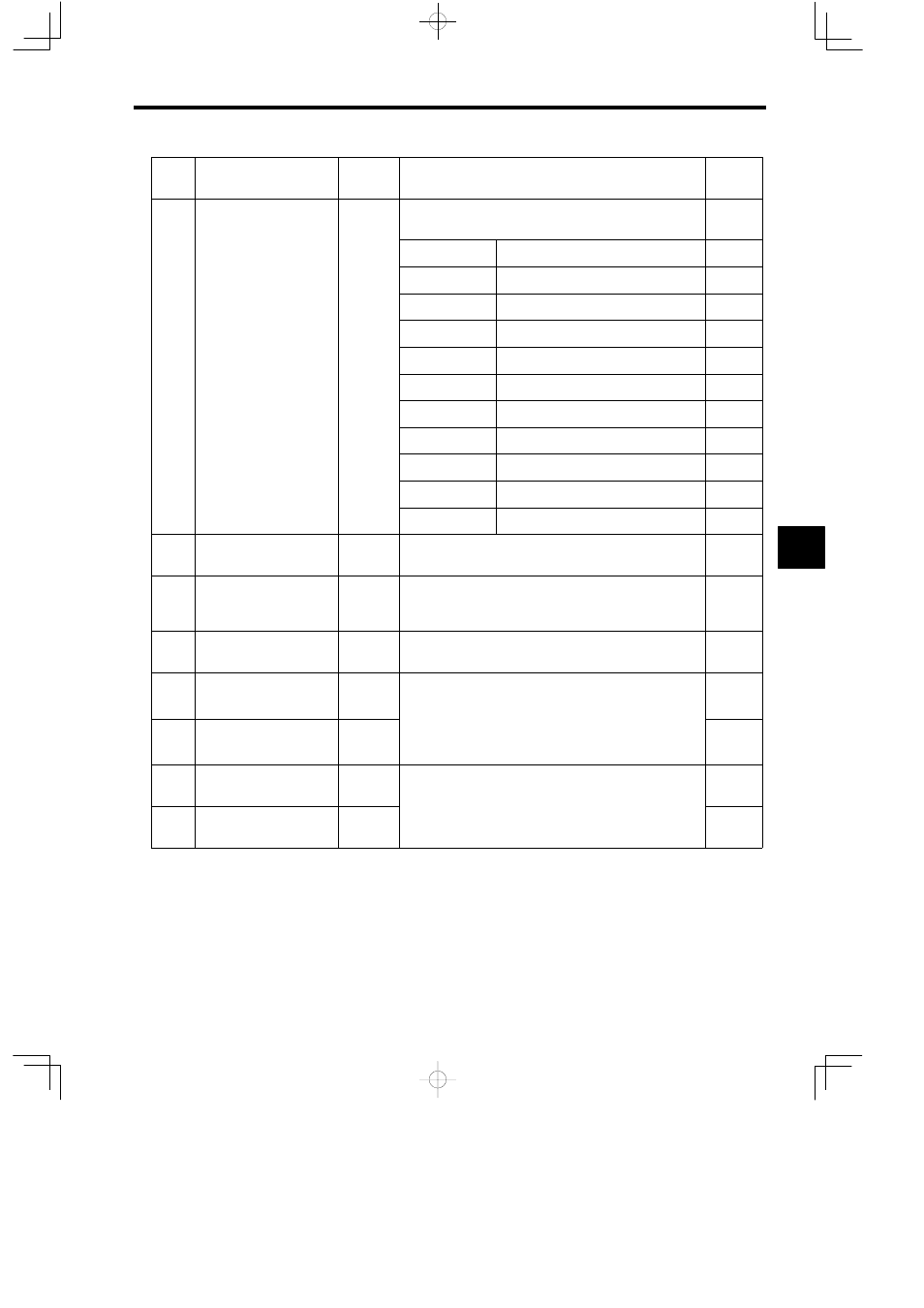
No.
Remarks
Description
Register
No.
Name
25
MECHATROLINK servo I/O
monitoring
IWxx25
This parameter is use to monitor I/O monitor data for the ME-
CHATROLINK servo.
−
b0: P-OT
Forward direction OT input
−
b1: N-OT
Reverse direction OT input
−
b2: DEC
Speed LS input
−
b3: PA
Encoder A phase input
−
b4: PB
Encoder B phase input
−
b5: PC
Encoder C phase input
−
b6
Not used.
−
b7
Not used.
−
b8
Not used.
−
b9: BRK
Brake status output
−
b10 to b15
Not used.
−
26
Rapid traverse speed refer-
ence output monitoring
ILxx26
This parameter is used to debug the system.
−
27
MECHATROLINK servo
user constant monitoring
ILxx28
This parameter allows the MECHATROLINK servo user
constant to be read using the CN_RD motion command. User
constant data that is read is stored at this parameter.
−
28
−
IWxx30 to
IWxx37
Not used.
−
29
Rightmost 2 encoder position
words at power OFF
ILxx38
These parameters are used for ABS system infinite length posi-
tion control.
E
d
iti
t
OFF
d
l
it
iti
t
−
30
Rightmost 2 encoder position
words at power OFF
ILxx3A
Encoder position at power OFF and pulse unit position at power
OFF are paired data that together are called ABS system infinite
length position control information.
−
31
Rightmost 2 absolute pulse
position words at power OFF
ILxx3C
The ABS system infinite length position control information
must be saved periodically in a low-speed drawing (DWG.L) to
M registers
−
32
Rightmost 2 absolute pulse
position words at power OFF
ILxx3E
M registers.
−
5