Table 6.6: moving command – Yaskawa Sigma II Indexer User Manual
Page 146
Sigma II Indexer User’s Manual
Serial Command Functions
6-17
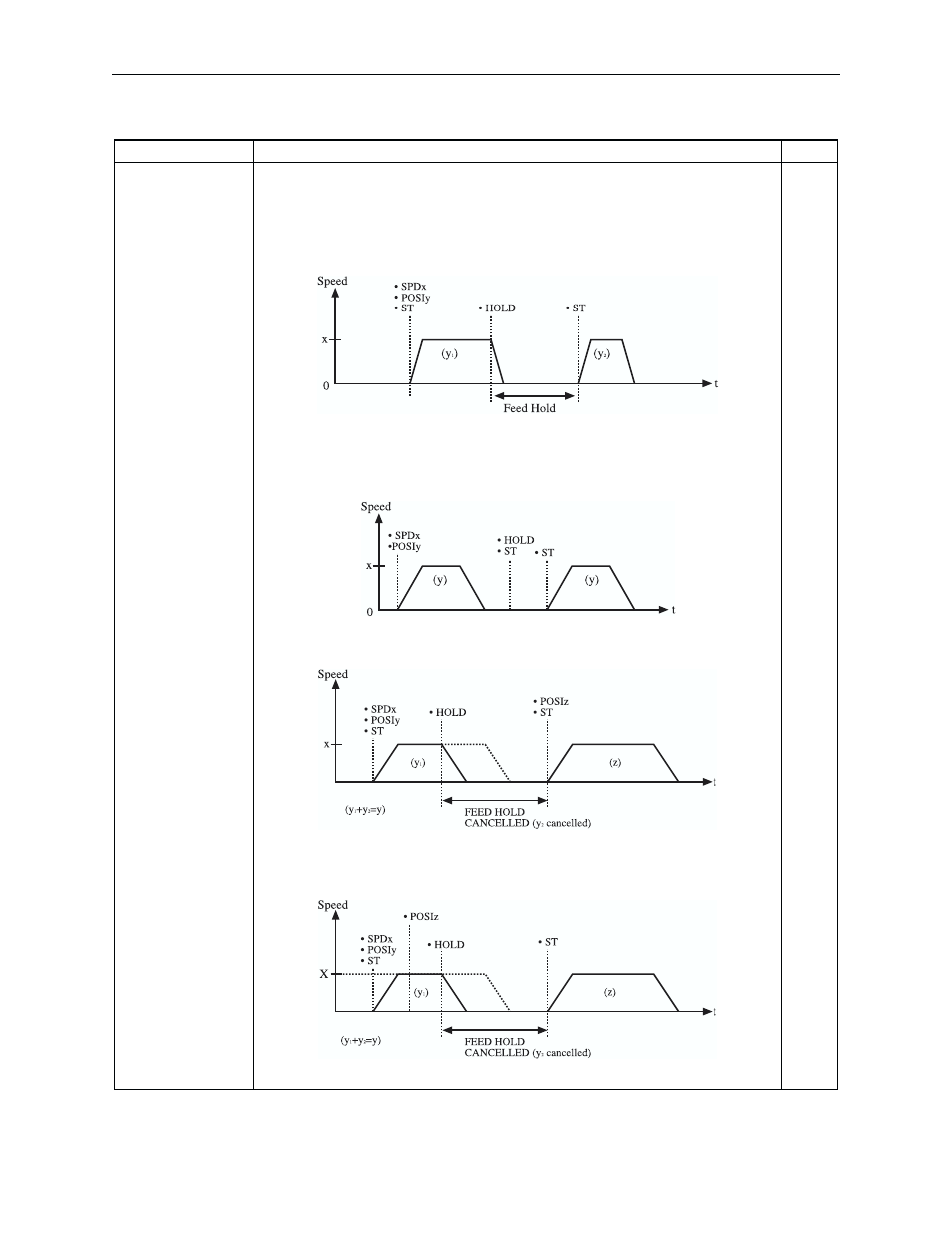
HOLD
Positioning Interruption (or Jog Stop)
Command to interrupt positioning. Remaining position is held.
(1) When this command is sent during positioning by ST command, operation stops at a
specified deceleration. However, the remaining amount is held. (Feed hold function). The
remaining position is executed by the following ST command.
(2) When HOLD command is sent during JOG operation (JOGP, JOGN) the same operation
is performed as SKIP command. Motor decelerates to a stop.
(3) When HOLD and ST commands are sent after positioning complete, no move is exe-
cuted. Repeat positioning with an additional ST command.
(4). When reserving a new position after positioning is interrupted by HOLD command, the
new positioning is executed.
(5) When reserving a new position while positioning before a HOLD command the follow-
ing ST command starts positioning to the new reserved position.
Pos:
OK
Neg:
ExxE
Table 6.6: Moving Command
Serial Command
Function / Description
Answer
(y
1
+y
2
=y)