6 absolute encoders, 1 interface circuit, 2 configuring an absolute encoder – Yaskawa Sigma II Indexer User Manual
Page 90
Sigma II Indexer User’s Manual
Absolute Encoders
5-35
5.6
Absolute Encoders
If a motor with an absolute encoder is used, the absolute position is detected in the Sigma II
Indexer. Consequently, automatic operation can be performed without a homing operation
immediately after the power is turned ON.
Motor
SGM
H– 1 ···With 16-bit absolute encoder
SGM
H– 2 ···With 17-bit absolute encoder
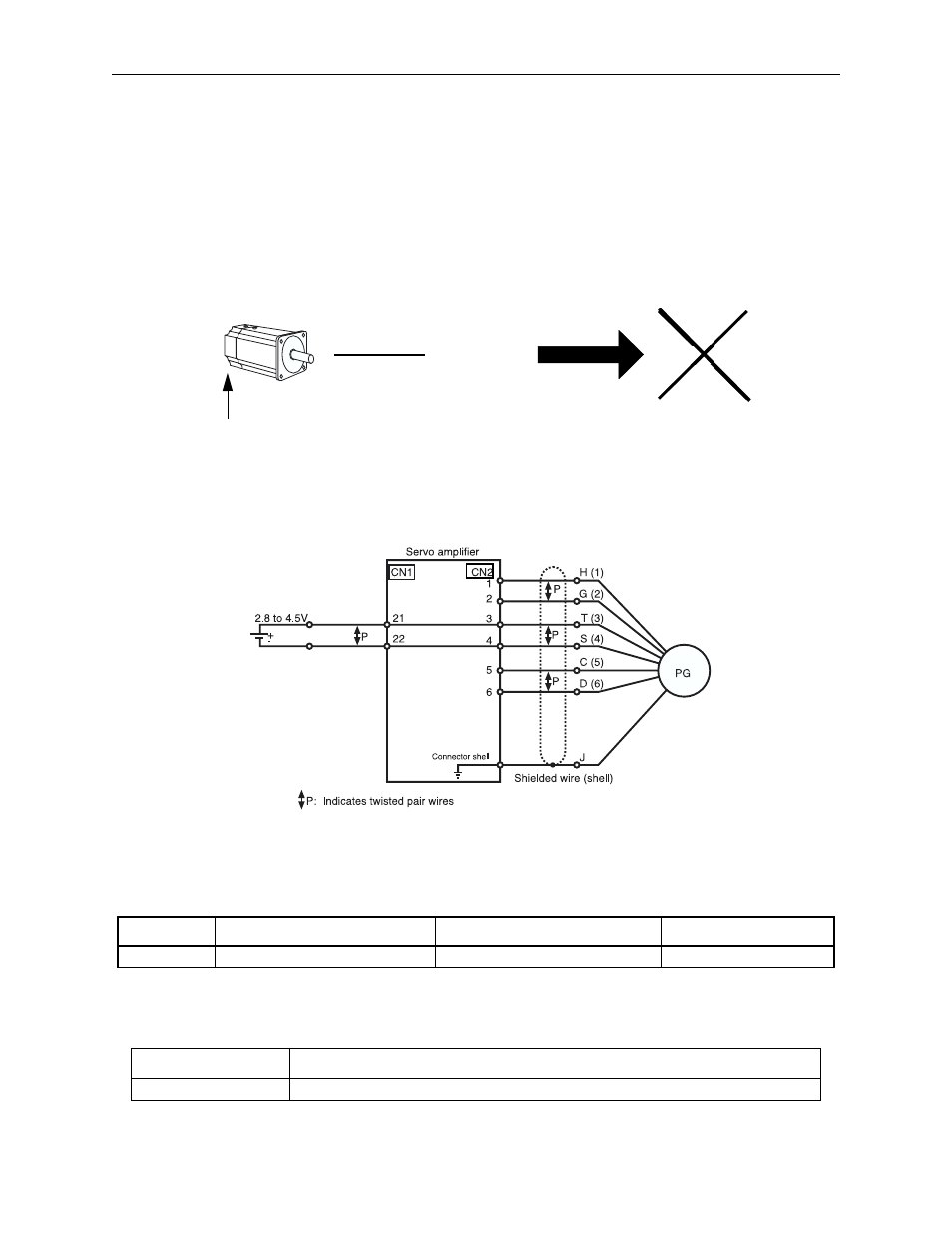
5.6.1 Interface Circuit
The following diagram shows the standard connections for an absolute encoder
mounted to a servomotor.
Figure 5.10 Absolute Encoder Interface Circuit
5.6.2 Configuring an Absolute Encoder
Select the absolute encoder’s application with the following parameter.
Either “0” or “1” in the following table must be set in order to enable the absolute
encoder.
Parameter
Signal
Setting
Default
Pn002.2
Absolute Encoder Application
Setting Range: 0 or 1
0
Pn002.2 Setting
Result
0
Uses the absolute encoder as an absolute encoder.
Always detects
absolute position.
Origin return operation
Absolute encoder
Homing Operation
BAT
BATO
BAT (+)
BAT (-)
PG5V
PG0V
PS
/PS