Yaskawa Sigma II Indexer User Manual
Page 74
Sigma II Indexer User’s Manual
Sequence I/O Signals
5-19
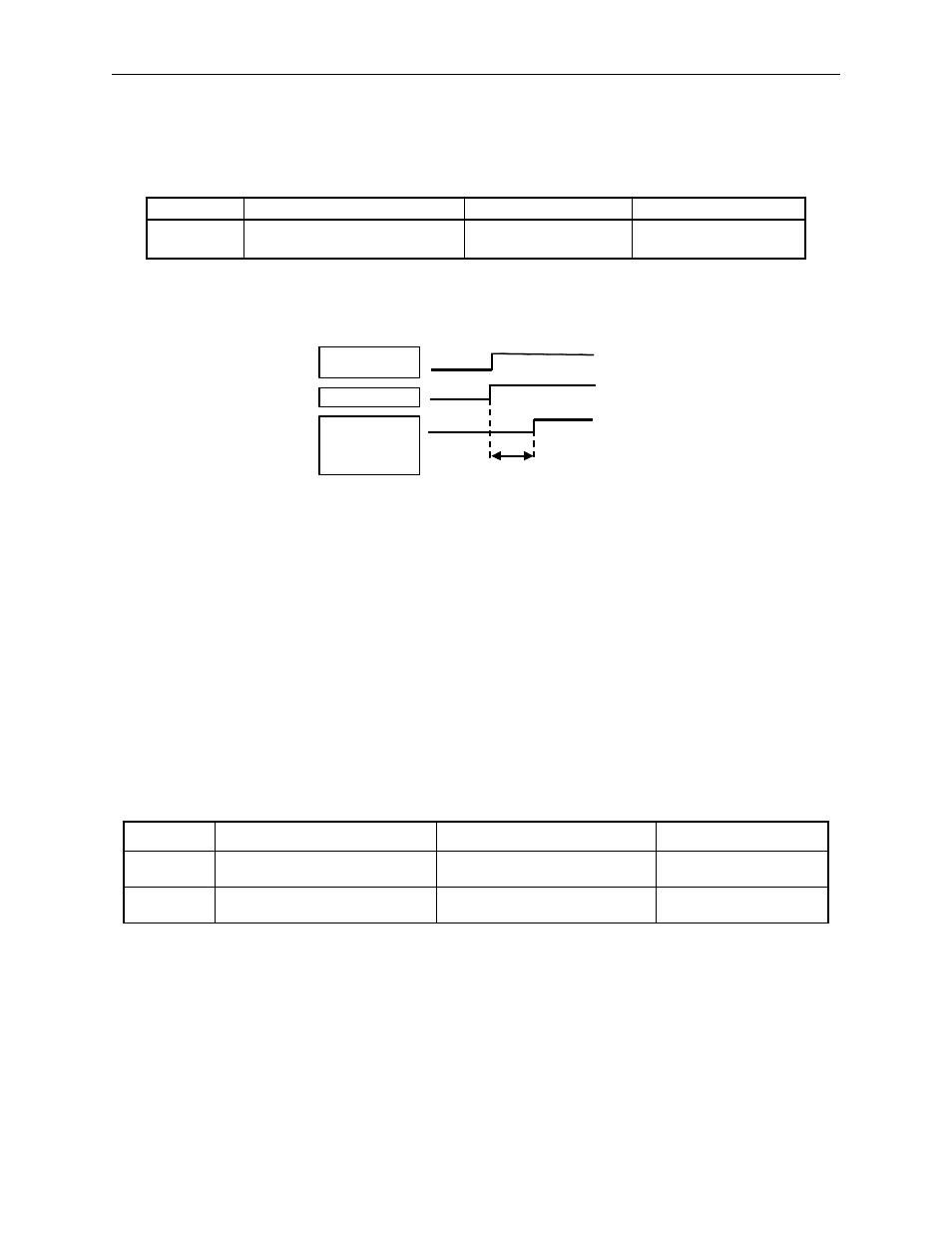
Brake ON Timing
If the equipment moves slightly due to gravity when the brake is applied, set the fol-
lowing parameter to adjust brake ON timing.
This parameter is used to set the output time from the brake control signal /BK until
the servo OFF operation (servomotor output stop) when a servomotor with a brake is
used.
With the standard setting, the servo is turned OFF when the /BK signal (brake opera-
tion) is active. The equipment may move slightly due to gravity depending on equip-
ment configuration and brake characteristics. If this happens, use this parameter to
delay servo OFF timing.
This setting sets the brake ON timing when the servomotor is stopped. Use Pn507
and 508 for brake ON timing during operation.
Note: The servomotor will turn OFF immediately if an alarm occurs. The equipment may move due to grav-
ity in the time it takes for the brake to operate.
Holding Brake Setting
Set the following parameters to adjust brake ON timing so the holding brake is
applied when the servomotor stops.
Parameter
Signal
Setting (10ms)
Default
Pn506
Brake Reference Servo OFF Delay
Time
Setting Range: 0 to 50
0
Parameter
Signal
Setting
Default
Pn507
Brake Reference Output Speed
Level
Setting Range: 0 to 10000rpm
100
Pn508
Timing for Brake Reference Output
during Motor Operation
Setting Range: 0 to 100 x 10ms
50
/S-ON input
(CN1-40)
/BK output
Servo ON/OFF
operation
(Servomotor
ON/OFF status)
Release brake
Servo ON
Servomotor
ON
Hold with brake
Servo OFF
Servomotor OFF
Servo OFF
time delay