Yaskawa J50M Instructions User Manual
Page 113
System Variable
#400 1
to
#402 1
#4102
#4107
#4109
#4111
#4114
#4115
#4119
#4120
Modal Information
G code (group 01)
to
G code (group 21)
B code
D code
F code
H code
Sequence number
Program number
S code
T code
through #4120 connot be placed to the
left-hand of the operation expression.
Sample Program
Main Program
G65
<Argument Designation> ;
I
Macro Program
09602 ;
#1 = #4001 ;
G O ( I
GO1
.
. ;
G 0 3
;
M99 ;
– G codes (GOO through
G03) of 01 group are
retained.
System
Variable
#5001
#5002
#5003
#5004
#5021
#5022
#5023
#5024
#5041
#5042
#5043
#5044
#5061
#5062
#5063
– G codes of 01 group
are restored.
#5064
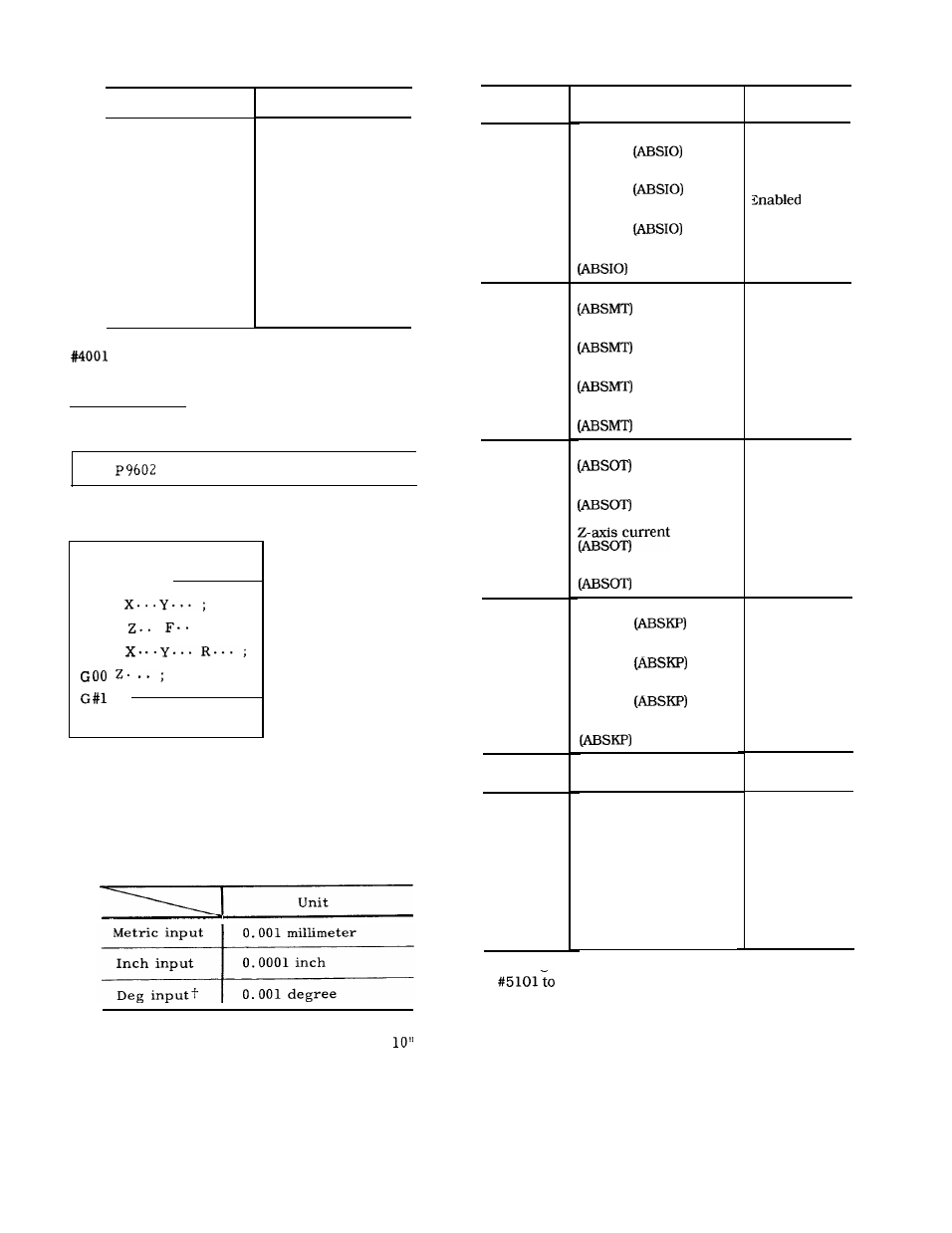
J. Positional Information (#5001 through #5104)
When system variables #5001 through #5104
are specified, various positional information can
be obtained.
The unit of the information is millimeters or inch-
es.
1
In the
user macro body, the “input unit x
feature is invalid.
#5083
#5101
#5102
#5103
#5104
Positional Information
X-axis block end
position
Y-axis block end
position
Z-axis block end
position
4th block end position
X-axis current position
Y-axis current position
Z-axis current position
4th current position
X-axis current position
Y-axis current position
position
4th current position
X-axis skip signal
position
Y-axis skip signal
position
Z-axis skip signal
position
4th skip signal position
Tool length correction
amount
X-axis servo position
deflection amount
Y-axis servo position
deflection amount
Z-axis servo position
deflection amount
4th servo position
deflection amount
Read During
Move
Enabled
Enabled *
Enabled *
Enabled
Enabled *
* Reading of #5021 to #5024, #5041 to #5044, and
#5104, when commanded during movement,
will be performed after completion of the movement of
the preceding block. Therefore radius compensation
is not performed.
105