Yaskawa J50M Instructions User Manual
Page 136
2.14.1 OVERVIEW (Cent’d)
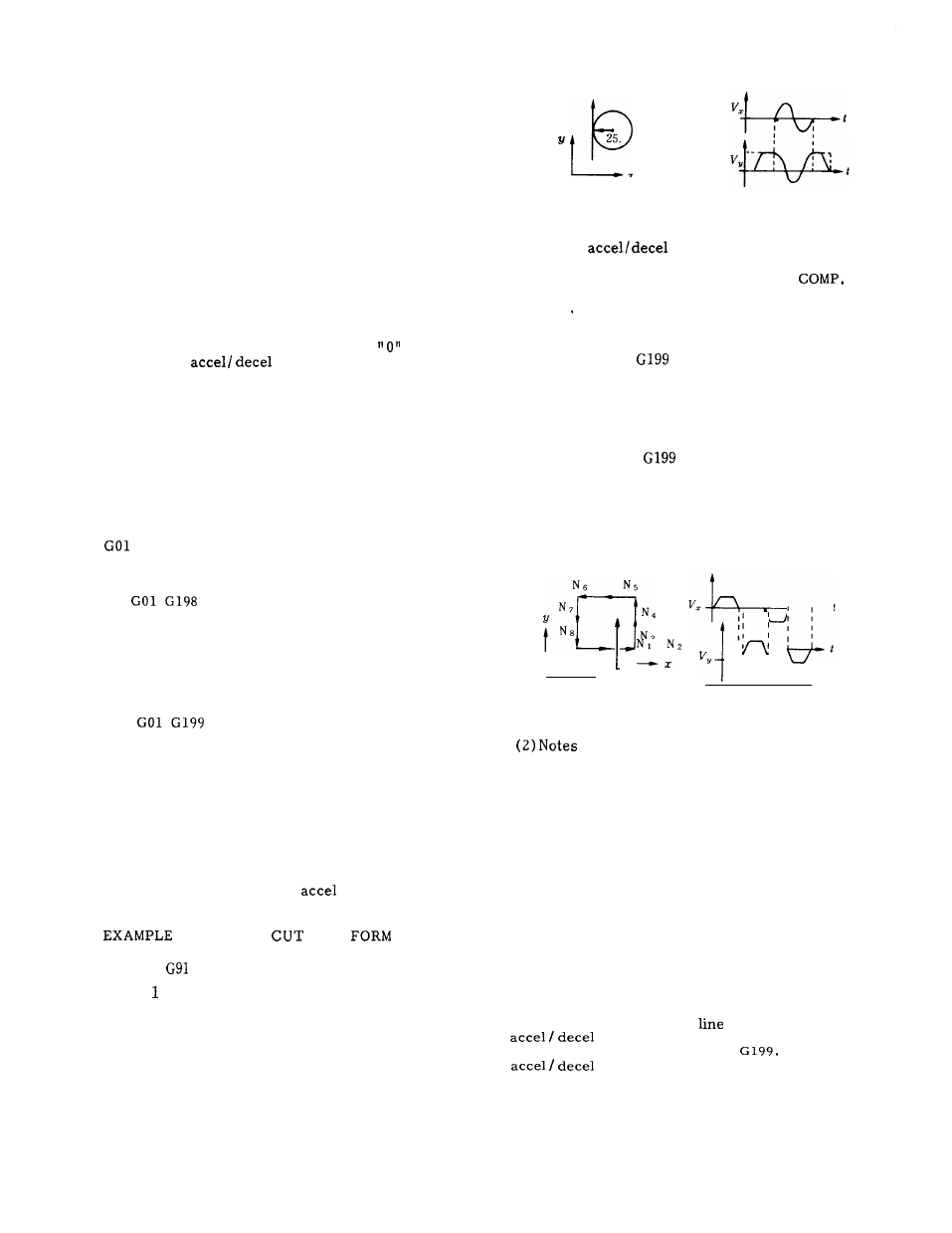
ORBIT
SPEED VARIATION
G198 is also the start and G199 the end of
form compensation.
25.
Circular projection compensation
Another problem is the projection remaining in
x
circular cutting, at the point where the quadrant is
switched.
(ii) When commanding a form with angle, divide
This projection can be made smaller by using
each line before and after the angle in two, and
the circular projection compensation function.
command
before and after the angle.
The above two functions are called high-speed
EXAMPLE (SQUARE CUT WITH FORM
) ;
contouring functions.
Note :
When using form compensation, set
in all the
exponential
parameters (#6418 to #6420) .
Otherwise, correct movement cannot be guaranteed.
2.14.2 FORM COMPENSATION FUNCTION
Programming
The form compensation mode turns on by com-
manding G198 in the GO1 mode.
This mode
GO1
G91 F6000 ;
N 1 X25. G198 ;
N 2 X25.
;
N 3 Y25. G198 ;
N 4 Y25. G199 ;
N 5 X-25. G198 ;
N 6 X-25.
;
N 7 Y-25. G198 ;
compensates for the delay of the servo system, and
performs interpolation.
This mode turns off by
N
8 Y-25. G199 ;
commanding G 199 in the single-block, feed hold or
modes.
M30 ;
(a) Command format
ORBIT
SPEED VARIATION
( i )
X . . . Y . . . Z . . . ;
(Start form compensation mode)
Command G198 under the GO1 mode after position-
ing, to turn on the form compensation mode,
perform linear acceleration to the currently
Then
commanded cutting speed in the block.
The move
command must be large enough for acceleration.
( i i )
X . . . Y , . . Z . . . ;
(End form compensation mode)
Command G 199 under the GO 1 mode in the form
compensation mode, to perform linear deceleration
and position at the commanded point.
The form
compensation mode turns off after positioning.
The move command must be large enough for
deceleration.
(b) Program example
(i) How to command linear
/ decel in a block
with discontinuous command speed
( C
I R
C
U L A R
W I T H
C
O M P
O
) ;
GO1
F1OOOO ;
N Y25. G198 ;
N 2 G02 125;
N 3 GO1 Y25. G199 ;
M30 ;
(a) The movement has no delay against the inter-
polation command, under the form compensation
mode.
Thus, if disconnected speed is commanded,
it can shock the machine, or cause servo error.
(b) Giving commands other than the interpolation
command under the form compensation mode can
shock the machine, or cause servo error.
(c) Performing single-block or feed hold under the
form compensation mode causes the form compen-
sation mode to turn off.
The form compensation
mode will not turn on until G198 is commanded
under modes other than the single-block mode.
(d) The override cannot be changed while executing
the block commanded with G 199.
(e) When interpolating a
shorter than the
distance, divide the line into two equal
parts, and command G198 and
Smooth
cannot be gained unless this division is
p r e c i s e .
128