Yaskawa J50M Instructions User Manual
Page 42
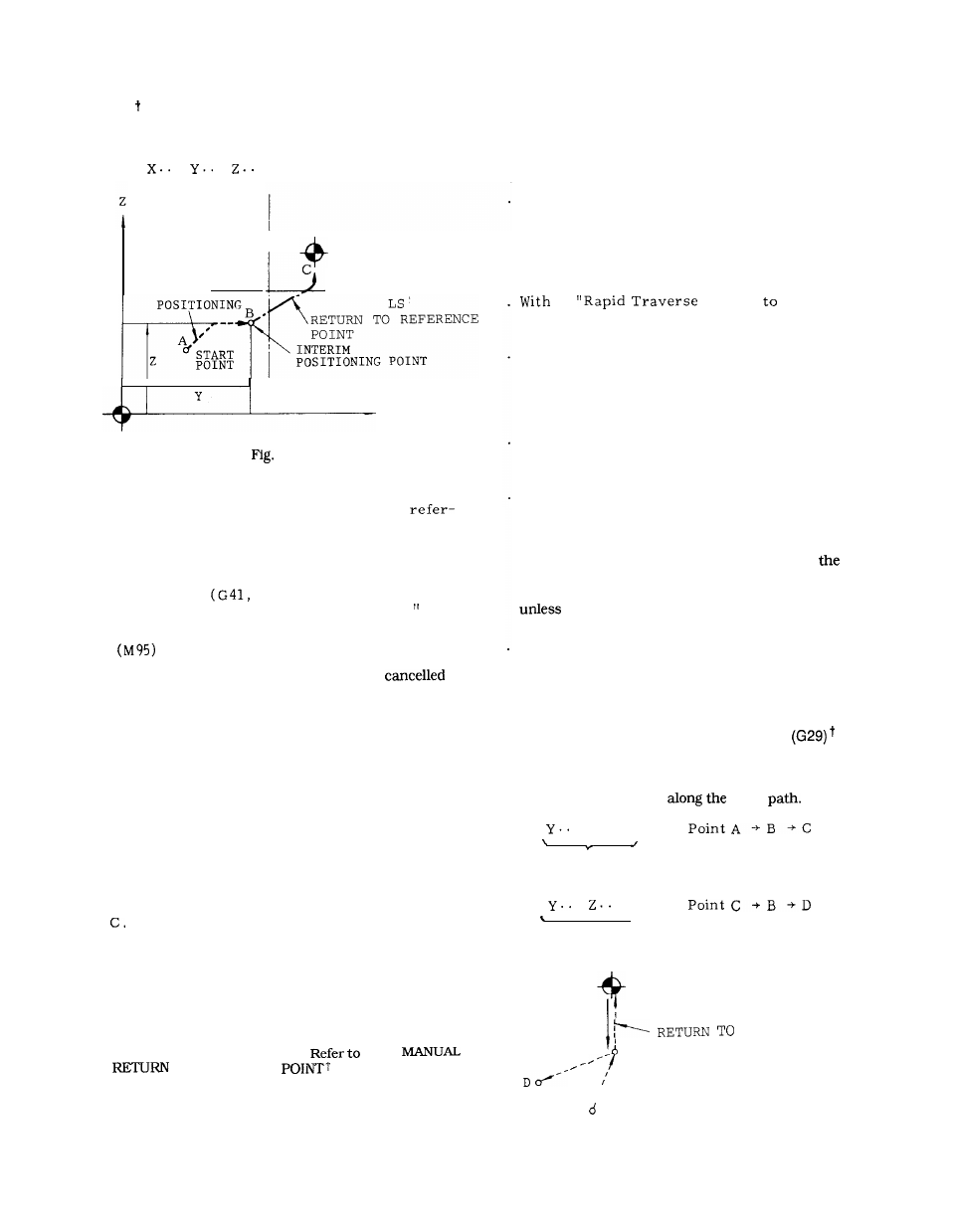
2.9.15 AUTOMATIC RETURN TO REFERENCE POINT
Return to reference point in rapid traverse
(G28)
(Cent’d)
In addition to the above “ Automatic Return to
EXAMPLE
Reference Point, “ “ Rapid Traverse Return to
Reference Point” function may be incorporated in
G28
.
.
. ;
the control.
With this function, the motion se-
quence is as follows.
I
,
REFERENCE POINT
c
Z - A X I S
—
-
- — D E C E L E R A T I O N
I
Y-AXIS DECELERATION LS
Y
2.27
“Return to reference point” involves the same
series of motions as the manual return to
ence point.
Notes :
If G28 is commanded in the tool radius compen-
sation mode
G42) or in a canned cycle,
this is regarded as an input error “ 024.
If G28 is commanded in the Mirror Image mode
, this constitutes an input error “058. “
The tool position offset command is not
by
G28. Be sure to cancel it before commanding G28. If
G28 is given in the tool position offset mode, the tool
motion by the succeeding program becomes as
described below. Care should be taken.
A .
B .
When the succeeding program is made in the
incremental mode:
Tool moves by the amount of incremental
value from the reference point .
The tool
offset is not effective.
When the succeeding program is made in the
absolute mode:
Tool moves to the position which is speci-
fied by absolute value and tool offset value.
When G29 is given immediately after the
G28:
By G29 command, the tool moves to the off-
set interim positioning point and the suc-
ceeding motion is made according to the
item A and B.
When returning the tool to the reference point for the
first time after turning on the power supply. pay
attention to the tool position.
5.2.1
TO REFERENCE
.
After positioning at an interim positioning point
B , the tool directly moves to the reference
point in rapid traverse. The returning time is
shorter than that with the ordinary return to
reference in which deceleration LSS are used in
all the axes.
th
e
R e t u r n
R e f e r e n c e
Point, ” point B may not necessarily be within
the reference point return possible area.
The rapid traverse return to reference point
becomes possible only after the tool has been
returned once to the reference point in all the
axes by manual operation or by G28, following
the turning on of the power supply.
Rapid traverse return to reference point is ef-
fective only with G28.
Manual return motions
are not changed by it.
Where a
4th
axis is used, when no command is given
for the 4th axis in a G28 command, and when the tool
has been returned to the reference point in the X-, Y- ,
and Z-axis, the tool moves to the reference point in the
rapid traverse return mode. If
a
command for
4th
axis is included in the command, the tool returns to
the reference point in the ordinary return mode,
the return motions in all the 4-axes have been
completed.
For return to reference point in rapid traverse, tool
cannot be moved in RAPID or JOG mode unless
REFERENCE POINT RETURN switch turns off after
completion of reference point return.
2.9.16 RETURN FROM REFERENCE POINT
This code is used to return the tool to its original
position after return to reference point by automatic
return to reference point
same
G28
. Z.. . ;
(Reference point)
Point B
G29
.
. ;
v
/
Point D
c
(REFERENCE POINT)
REFERENCE
POINT
B
(INTERIM POSITIONING
POINT )
A
Fig. 2.28
34